

Task decomposition method for heterogeneous multi-robot system based on recursive algorithm
A multi-robot, system task technology, applied in the field of heterogeneous multi-robot system task decomposition, can solve the problems of economic benefit gap, uncertain task environment, poor versatility, etc., and achieve good adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0024] The present invention is a task decomposition method for heterogeneous multi-robot systems based on a recursive algorithm. In order to make the purpose, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific examples.
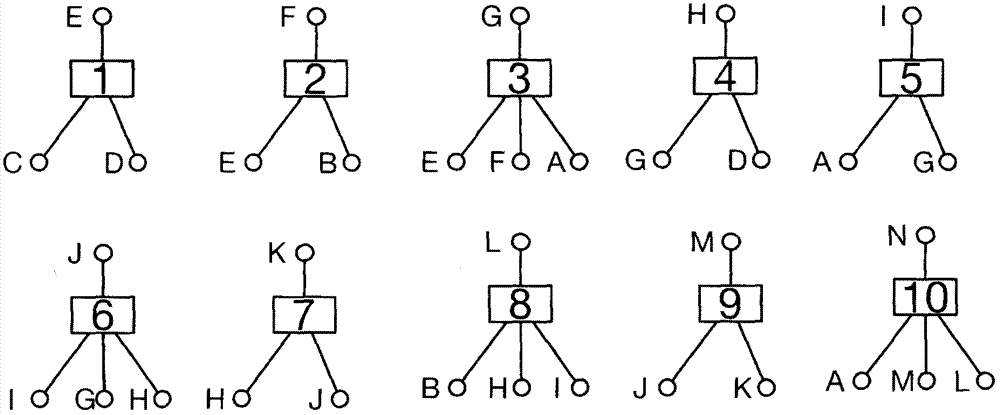
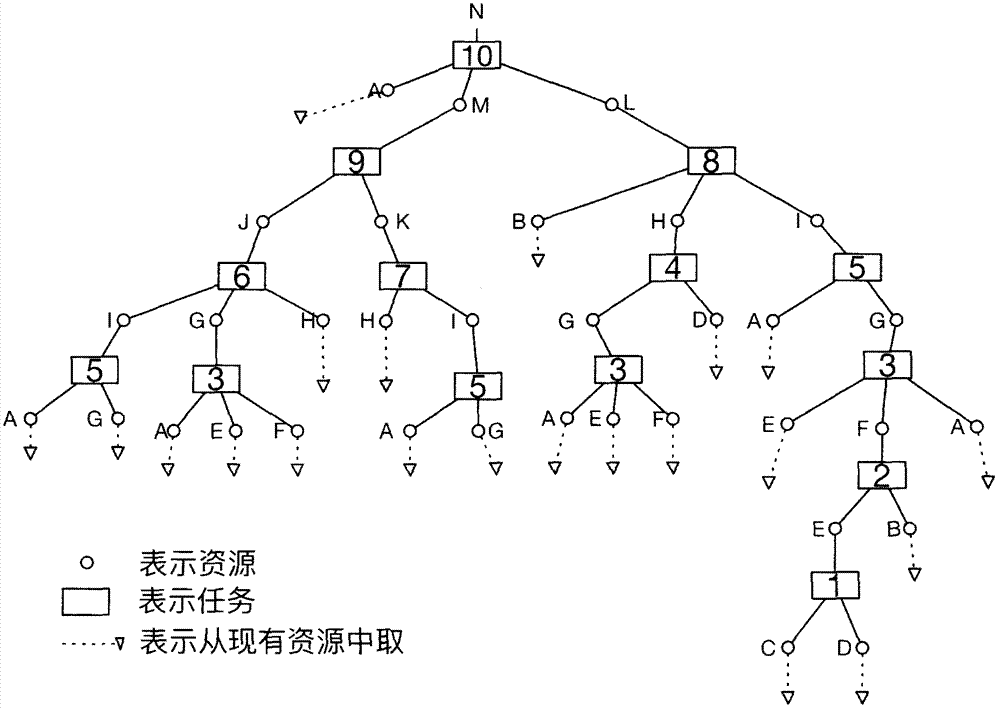
[0025] Step (1). Formally express the resources involved in the task execution process. To complete a task, certain conditions need to be met, and the corresponding result will be produced after the task is completed. We collectively refer to such conditions and results as resources in a multi-robot system, and such resources are countable. Define a two-tuple r=nam , r num >, where r represents a resource situation in the system, r nam Uniquely identifies the type of resource r, r num Indicates the amount of resource r. All types of resources in the system need to be expressed in the above form. For example, means...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More