

A smart laboratory robot carrying method and system
A laboratory robot and robot technology, applied in the field of intelligent laboratory robot carrying methods and systems, can solve the problems of path planning instability, randomness, only interruption, etc., to avoid instability, improve efficiency, and improve accuracy Effects of Sex and Stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
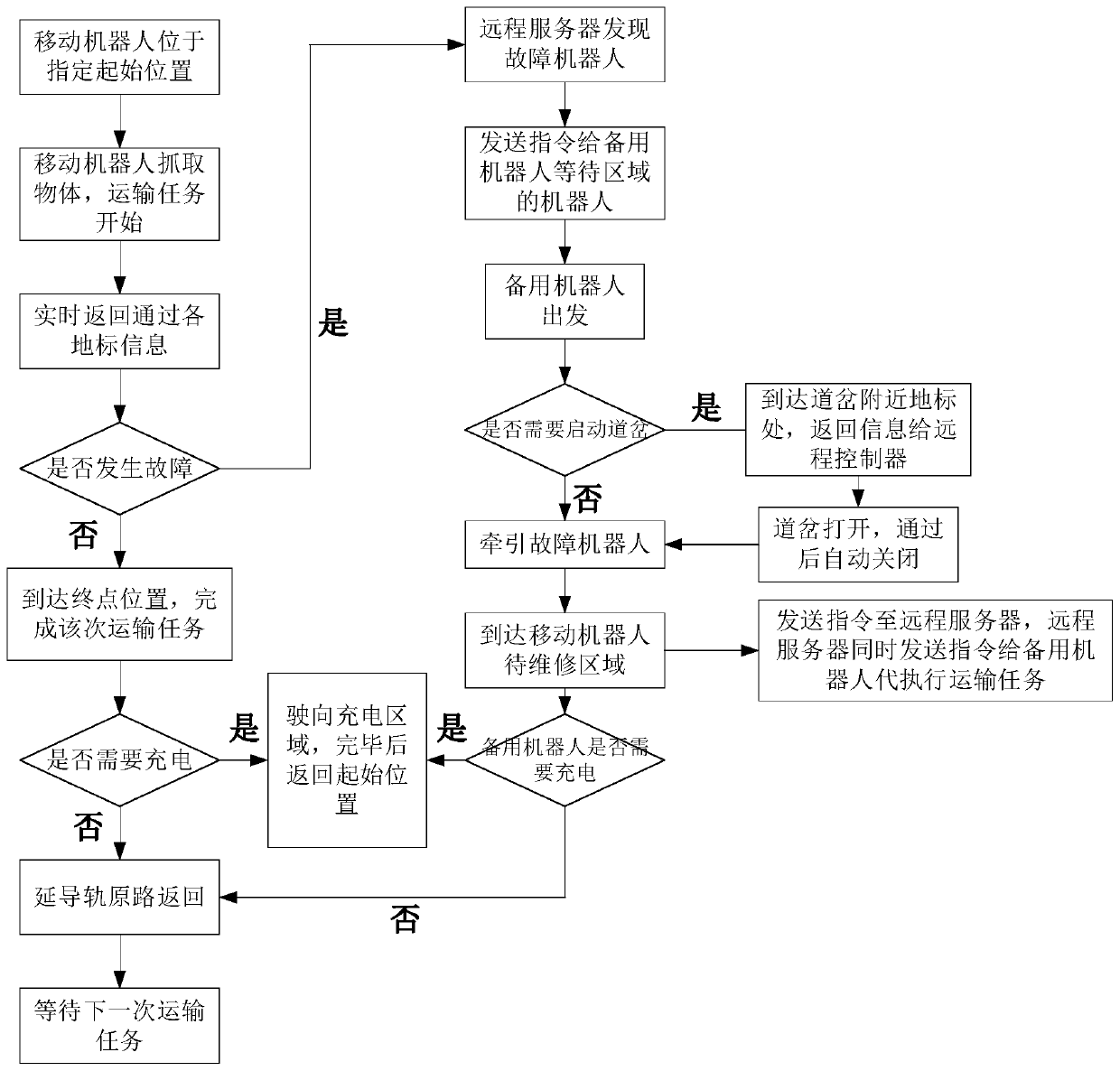
[0046] Such as figure 1 Shown, a kind of smart laboratory robot carrying method comprises the following steps:
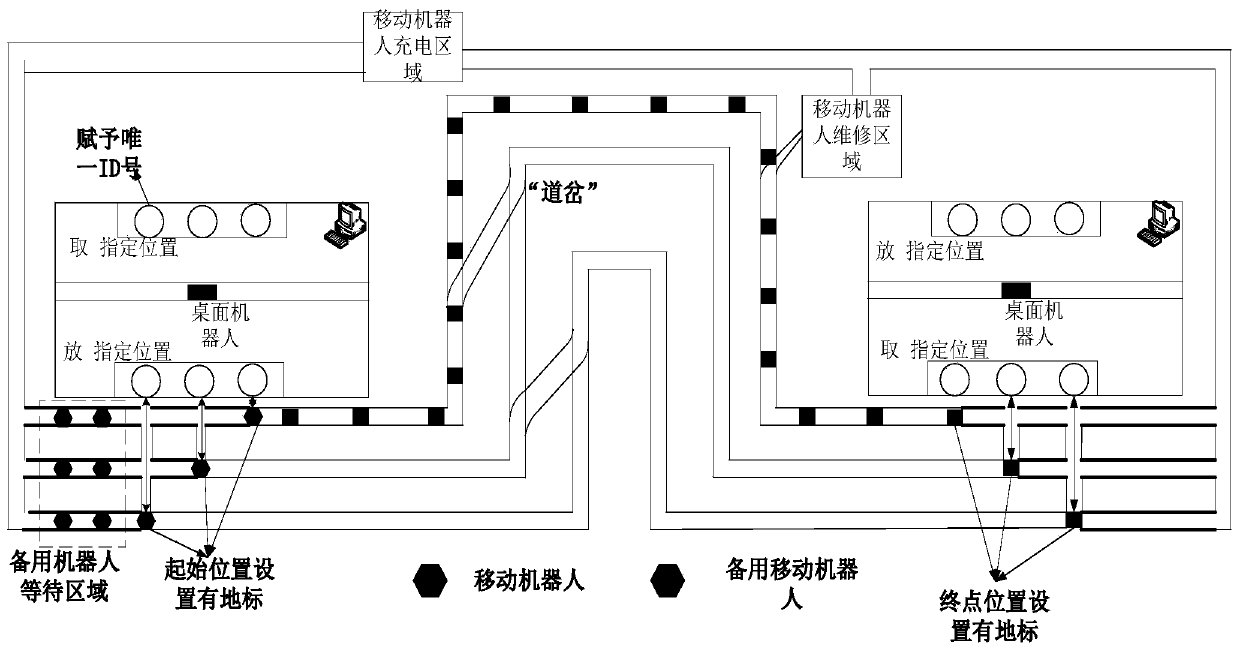
[0047] Step 1: Set up a ground guide rail between the workbenches where the starting point and end point of the transportation are located, set up a desktop guideway on the workbench, a designated pick-up location, a temporary pick-up location, and a designated place to put the object, and use the remote controller to send the pick-up instruction;
[0048]Use the remote controller to send fetching instructions to the mobile robot and the desktop controller, so that the mobile robot moves to the fetching workbench, and the desktop robot moves to the designated pick-up position to start the fetching task;
[0049] The desktop guide rail is arranged in the middle of the workbench, and the designated pick-up position, temporarily put pick-up po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More