

Variable-rigidity flexible joint based on leaf springs and control method of variable-rigidity flexible joint
A flexible joint and variable stiffness technology, applied in the field of robotics, can solve problems such as poor environmental adaptability, complex transmission process, and complex structure, and achieve the effects of preventing the plastic deformation of leaf springs, reducing joint volume, and strong environmental adaptability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be described in further detail below in conjunction with the accompanying drawings.
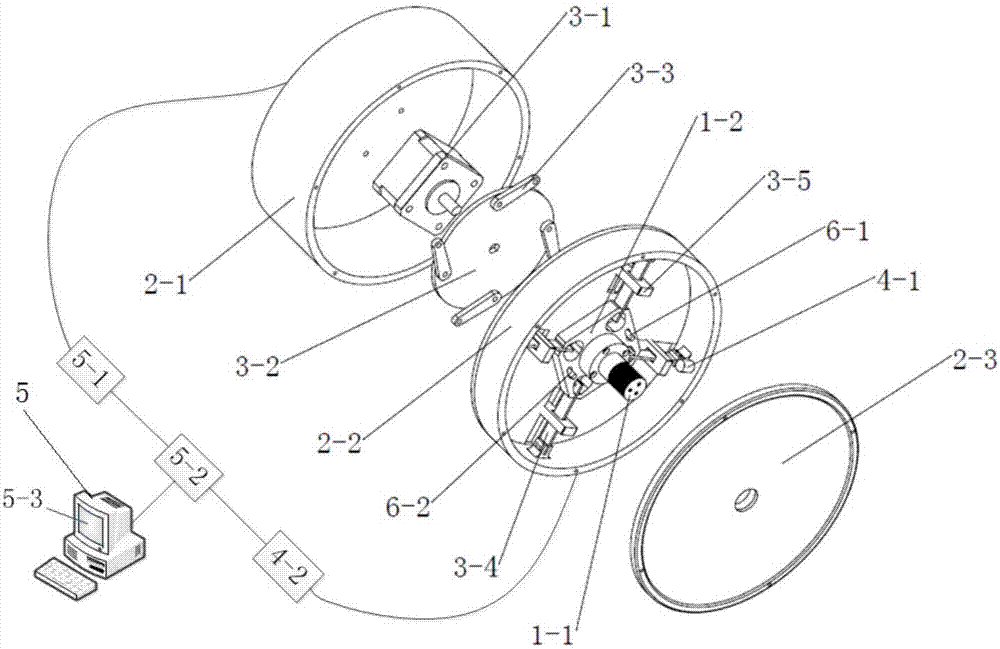
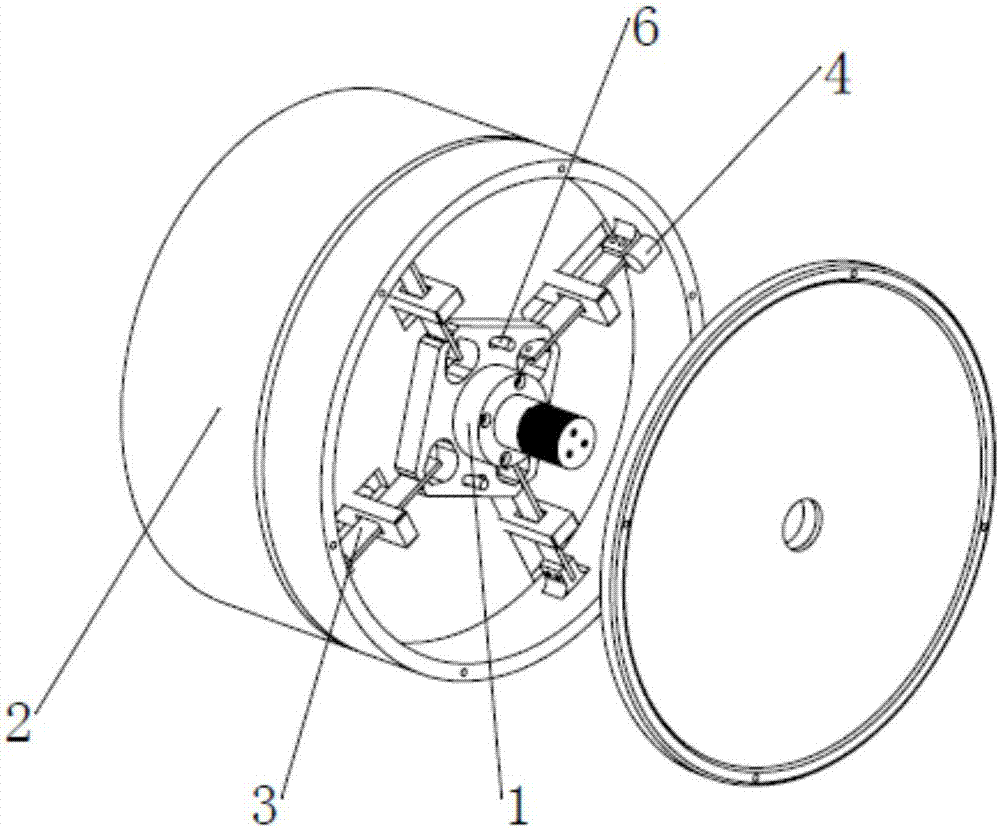
[0036] Such as figure 1 , figure 2 As shown, a variable stiffness flexible joint based on a leaf spring includes an input shaft 1, an output shaft 2, a stiffness adjustment mechanism 3, a displacement detection system 4, and a control system 5; the input shaft 1 and the output shaft 2 are connected by rotating The pair is matched and fixed in it, the stiffness adjustment mechanism 3 is installed on the output shaft 2,
[0037] Such as figure 1 , Figure 4As shown, the input shaft 1 includes a first input shaft 1-1 and a second input shaft 1-2, the first input shaft 1-1 is concentrically connected with the second input shaft 1-2, and the second input shaft Axis 1-2 is a square plate-shaped structure, and its four corners are mirrored with hyperboloid grooves respectively. The hyperboloid groove structure can realize the line contact with the leaf spring g...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More