Multi-level progressive classification and identification method for small-current ground faults
A technology of small current grounding and classification identification, which is applied in the direction of fault location, measurement of electricity, and measurement of electrical variables, etc., can solve the problems of single and fuzzy identification types, achieve clear structure, promote continuous improvement, and be easy to program.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] In order to achieve the above object, the technical scheme that the present invention takes is as follows figure 1 , 2 :
[0056] The fault characteristics are decomposed into four different factors and analyzed at different levels to form a multi-level progressive fault classification and identification method, which provides a basis for further establishing a fault identification model.
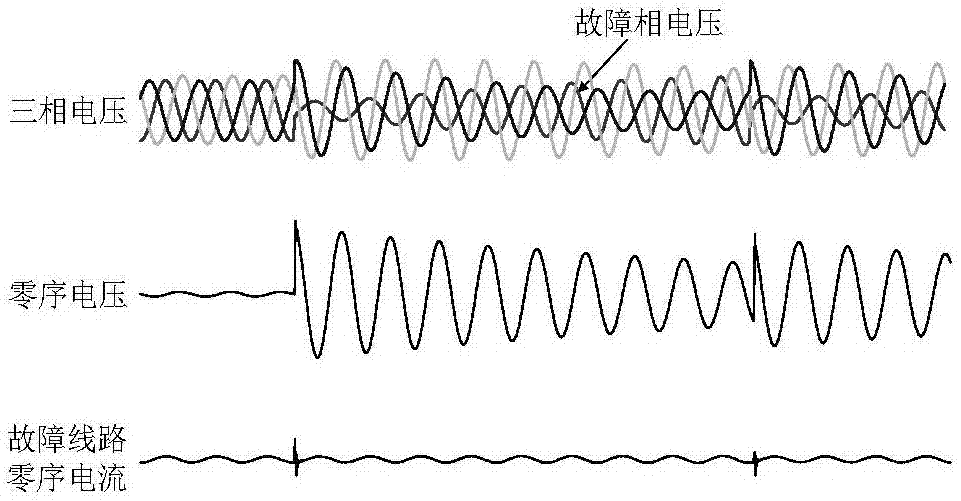
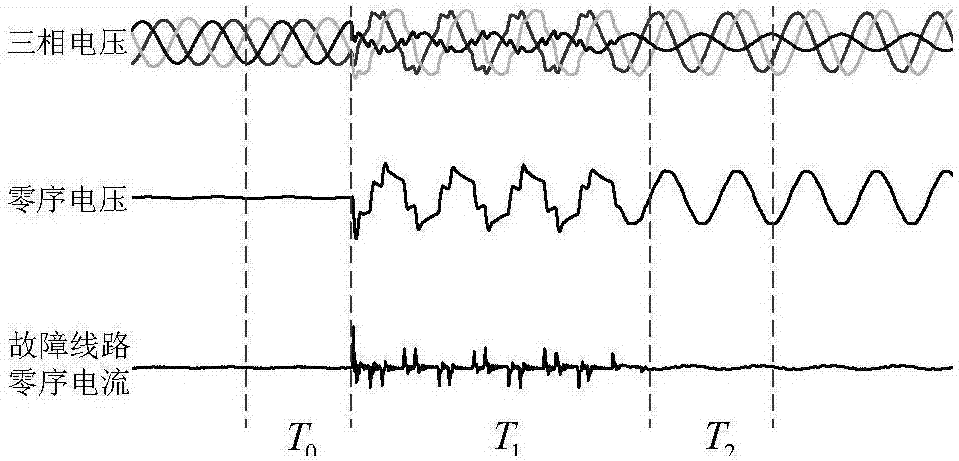
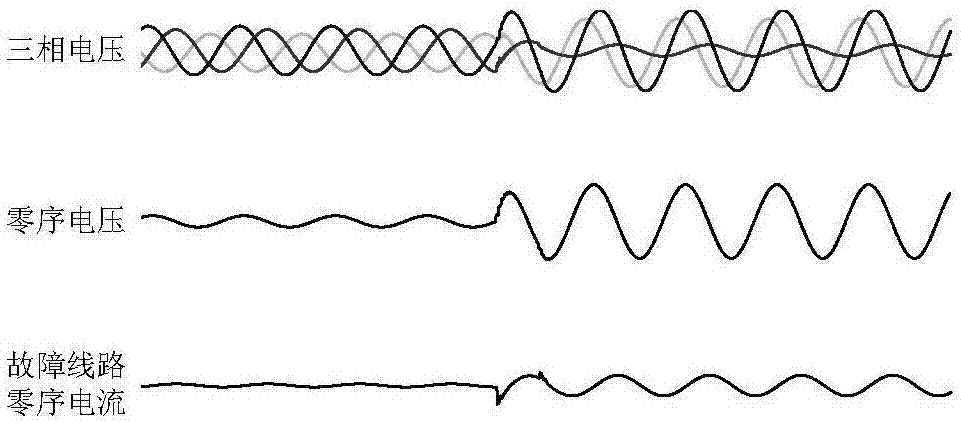
[0057] The multi-level progressive classification and identification method for small current ground faults includes setting a four-layer progressive fault classification data module according to the characteristics of small current ground faults to provide a basis for further establishing a fault identification model, specifically, including the first Module layer 1, the first module layer 1 divides faults into permanent faults, transient faults and intermittent faults according to the time domain characteristics of faults. Permanent faults refer to the grounding state in which the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



