

Space zero-prior target acquisition method based on multi-source visual information fusion
A visual information and target capture technology, applied in the field of spatial zero-priority target capture, can solve problems such as algorithms that do not involve target detection and recognition, and achieve the effect of continuous measurement, information coherence, and accurate measurement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0078] Specific embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings.
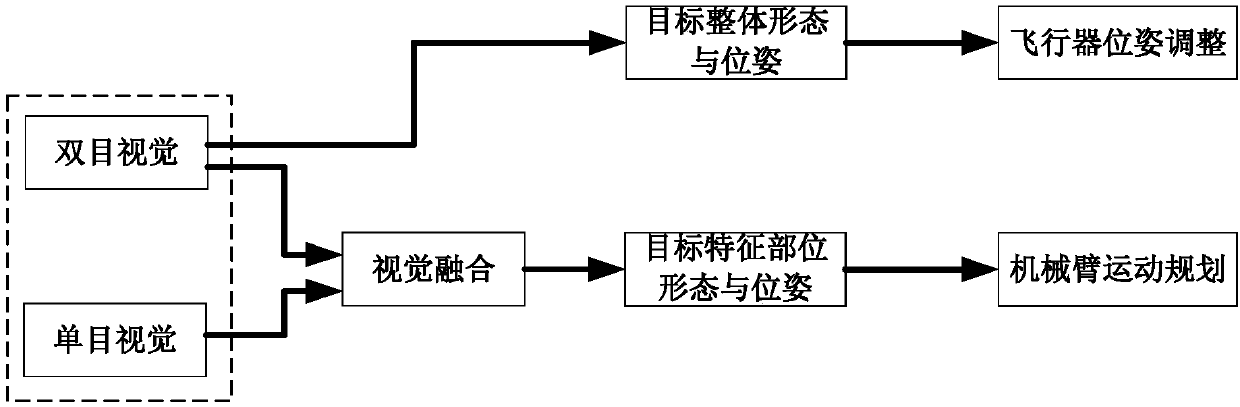
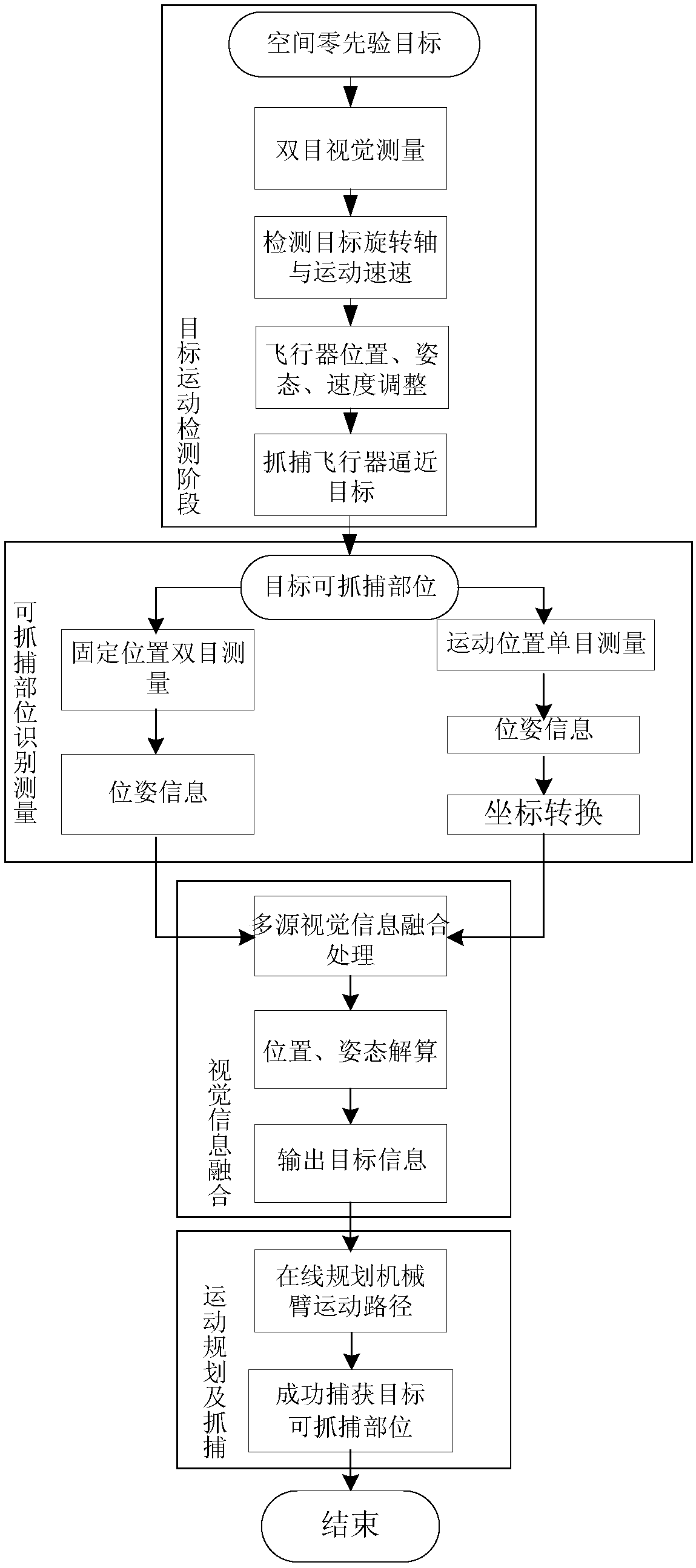
[0079] Such as figure 2 As shown, the present invention is a spatial zero prior target acquisition method based on multi-source visual information fusion. The method aims at the spatial zero prior information target, through binocular visual recognition, matching and three-dimensional reconstruction methods to realize the target overall and The measurement of the local shape and pose of the graspable parts; through the composite measurement method of "fixed position binocular vision + moving position monocular vision", the multi-source information fusion processing of the position and attitude information of the graspable parts of the target is realized, which improves the information quality. The accuracy and reliability of the manipulator also provide input for the autonomous motion planning of the manipulator; through the multi-con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More