Macro-micro-mechanical arm used for underwater robot
An underwater robot, micro-manipulator technology, applied in the direction of manipulator, underwater operation equipment, claw arm, etc., to achieve the effect of convenient maintenance, improved work space, and great promotion prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044]The present invention will be further described below:
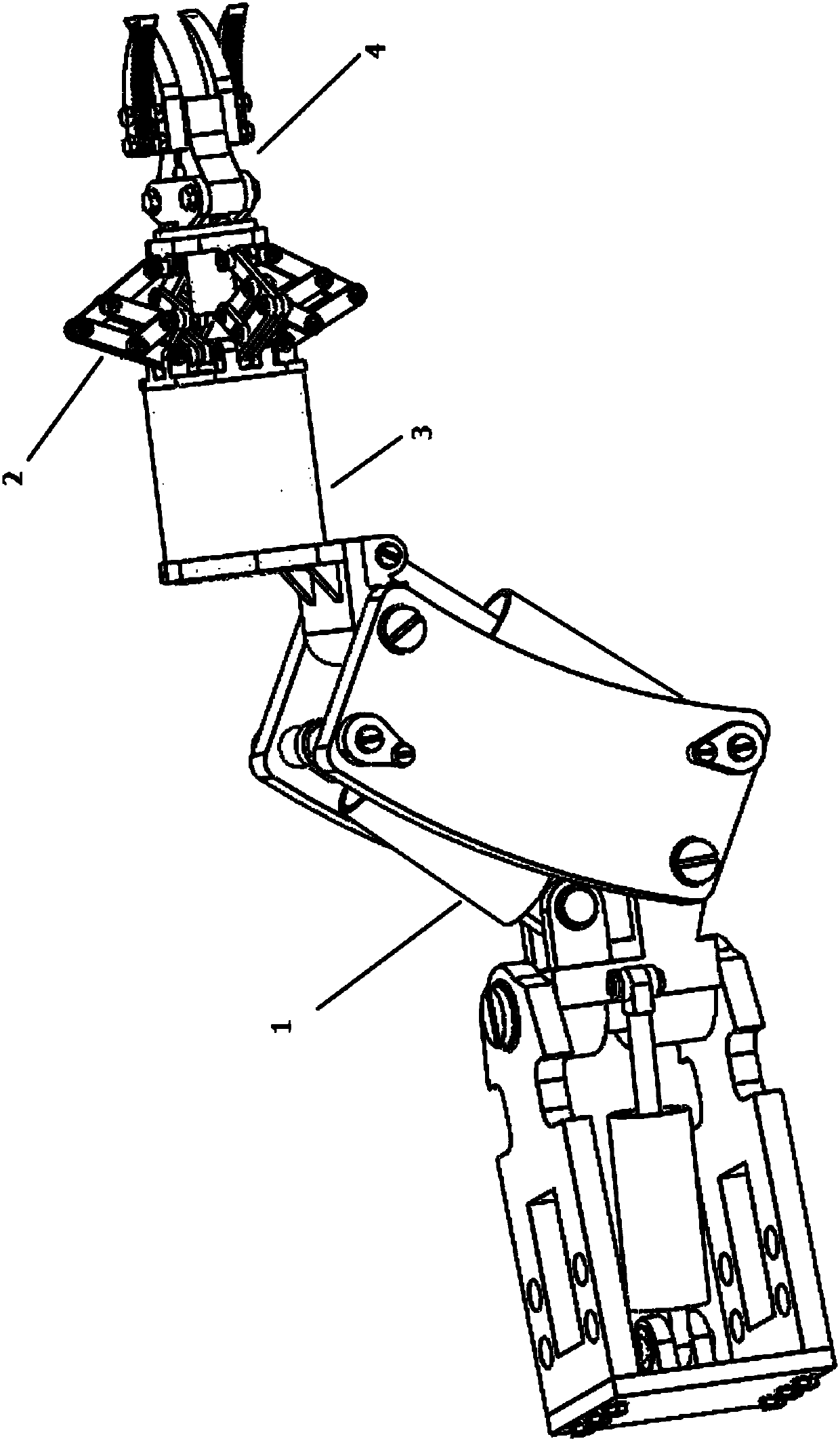
[0045] This macro-micro-manipulator for an underwater robot includes a macro-manipulator 1 , which is unique in that: a wrist hydraulic motor 3 , a micro-manipulator 2 and a gripper 4 are connected to the macro-manipulator 1 . Among them, the macro-manipulator 1 is connected to the wrist hydraulic motor 3 , the wrist hydraulic motor 3 is connected to the micro-manipulator 2 , and the micro-manipulator 2 is connected to the gripper 4 .
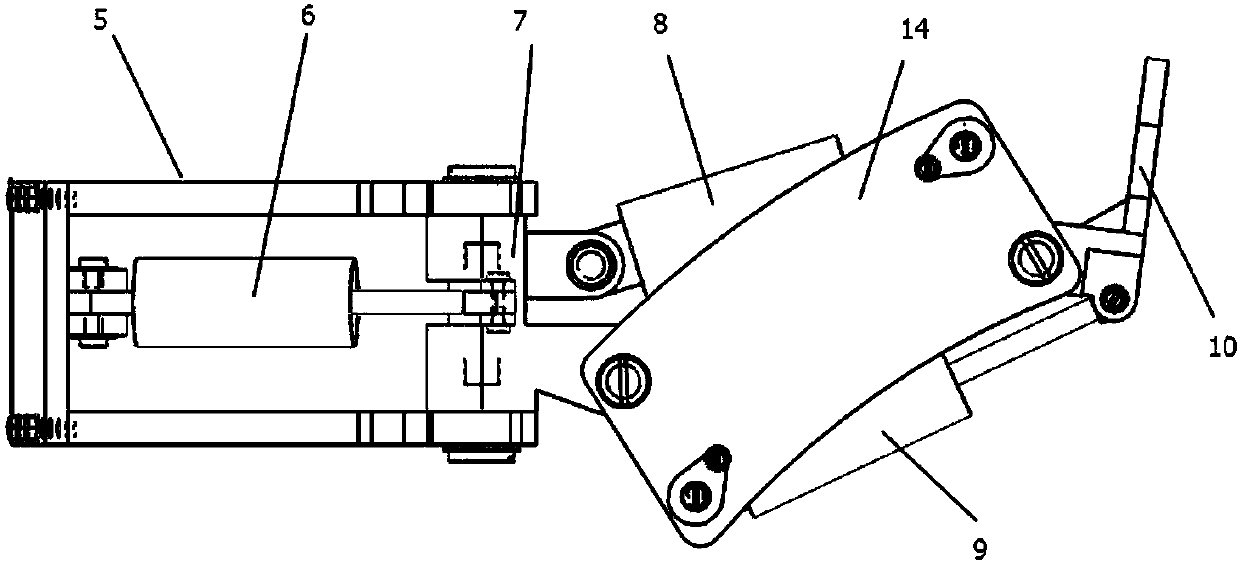
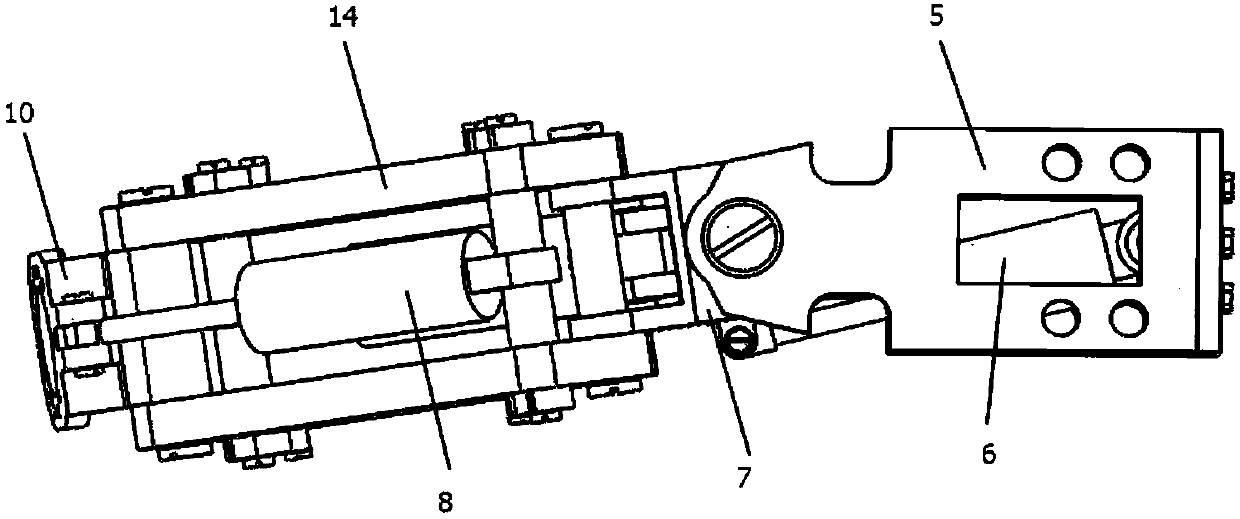
[0046] The macro robotic arm 1 includes a mechanical arm base 5 , a boom swing hydraulic cylinder 6 , a boom rotary joint 7 , a boom pitch hydraulic cylinder 8 , a wrist pitch hydraulic cylinder 9 and a wrist connection joint 10 . Wherein, the manipulator base 5 is made up of two horizontal plates 11 and a vertical plate 12, and there are fixing holes 13 on the vertical plate 11, which are used to fix this kind of macro-micro mechanical arm on the body of the robot; The shaft is co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com