

Patrol robot simultaneous localization and mapping method in underground space based on depth-inertial odometer
A technology for inspection robots and underground spaces, applied in two-dimensional position/channel control, instruments, calculations, etc., can solve problems such as low positioning accuracy, lack of simultaneous positioning and map construction, and weak robustness, and achieve The effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
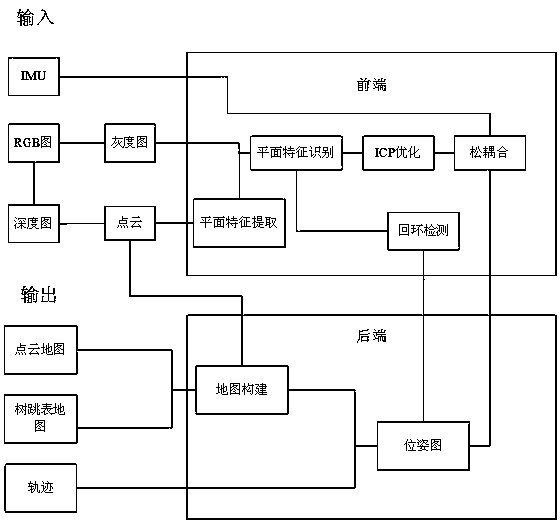
[0039] The present invention will be further described through specific embodiments below in conjunction with the accompanying drawings.
[0040] Such as Figure 1 to Figure 6 As shown, a method for simultaneous localization and map construction of an inspection robot in underground space based on a depth inertial odometer. The simultaneous localization method is: using a depth camera and an inertial measurement unit for loose coupling, and obtaining a point cloud through a depth map collected by a depth camera information to extract plane features. The RGB image collected by the depth camera and the plane feature are fused, and the iterative closest point (ICP) algorithm is used for optimization; the ICP optimized data is loosely coupled with the inertial measurement unit (IMU) data, and the pose is improved by using loop closure (Loop closure) map accuracy, to obtain the inspection robot's running trajectory, point cloud map and tree jump table map.
[0041] The depth came...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More