

Intelligent moving equipment with execution mechanism and drive method
A technology for mobile equipment and actuators, applied in the field of mobile robots, can solve problems such as increased operations, vehicle overturning accidents, limitations of working space and operation flexibility, etc., to improve rigidity, increase positioning coordination, increase working space and flexibility. sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
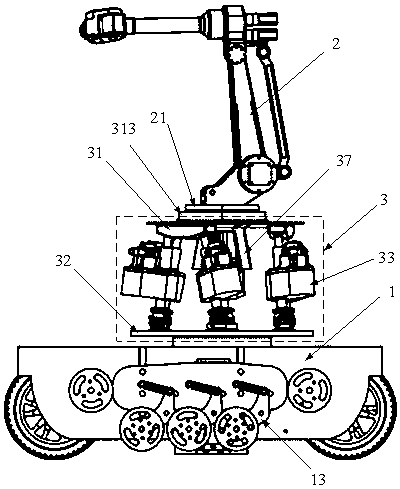
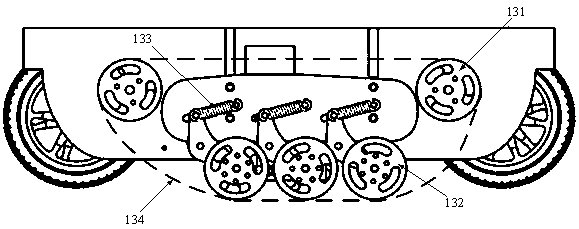
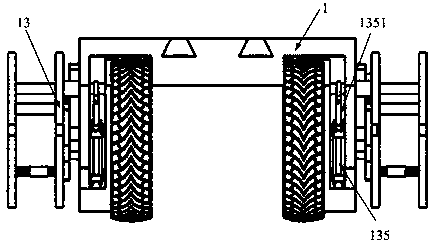
[0128] Such as figure 1 with figure 2As shown, an intelligent mobile device with an actuator includes a mobile platform 1, a parallel carrying device 3, and a manipulator 2. The manipulator 2 has six degrees of freedom. The manipulator 2 is driven by a motor. The mobile platform 1 has a wheel-shoe conversion mechanism 13. Shoe changing mechanism 13 is positioned at the left and right sides of mobile platform 1, and wheel-shoe changing mechanism 13 has driving wheel 131 and driven wheel 132, and driving wheel 131 is fixed, and driven wheel 132 has the motion of sliding up and down along the side of wheel-shoe changing mechanism 13, The damping buffer spring 33133 is installed on the adjusting mechanism of the wheel-shoe changing mechanism 13 . Such as image 3 As shown, the driving element hydraulic cylinder 35135 of the wheel-shoe changing mechanism 13 is symmetrically installed on the inner side of the wheel-shoe changing mechanism 13. By controlling the hydraulic cylinder...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More