

Unmanned rescue robot on water surface
A robot and plane technology, applied in the directions of unmanned surface ships, life rafts, motor vehicles, etc., can solve the problems of safety threats to rescuers, inability to meet rescue needs, etc., and achieve the effect of improving rescue efficiency, light weight and high safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
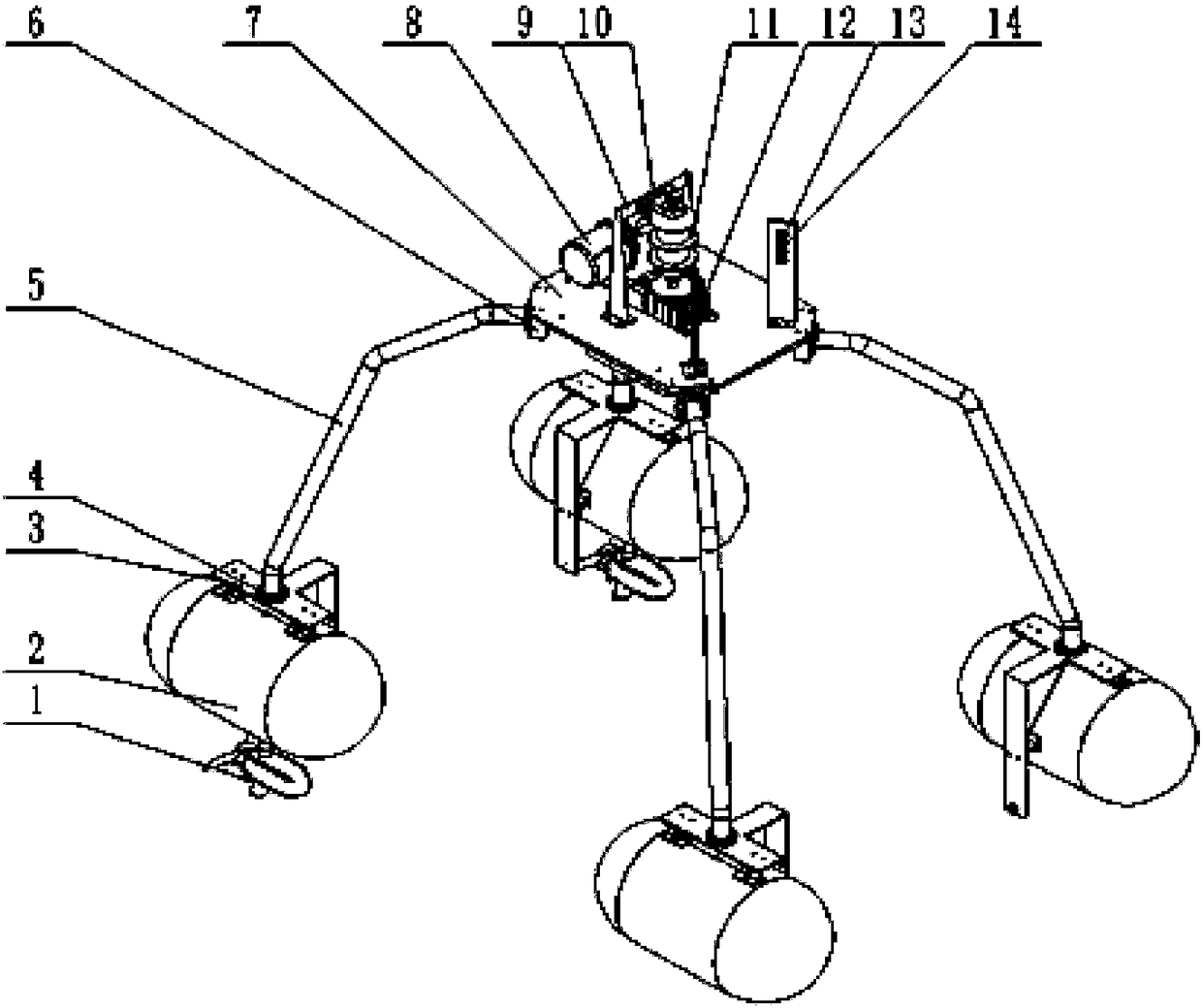
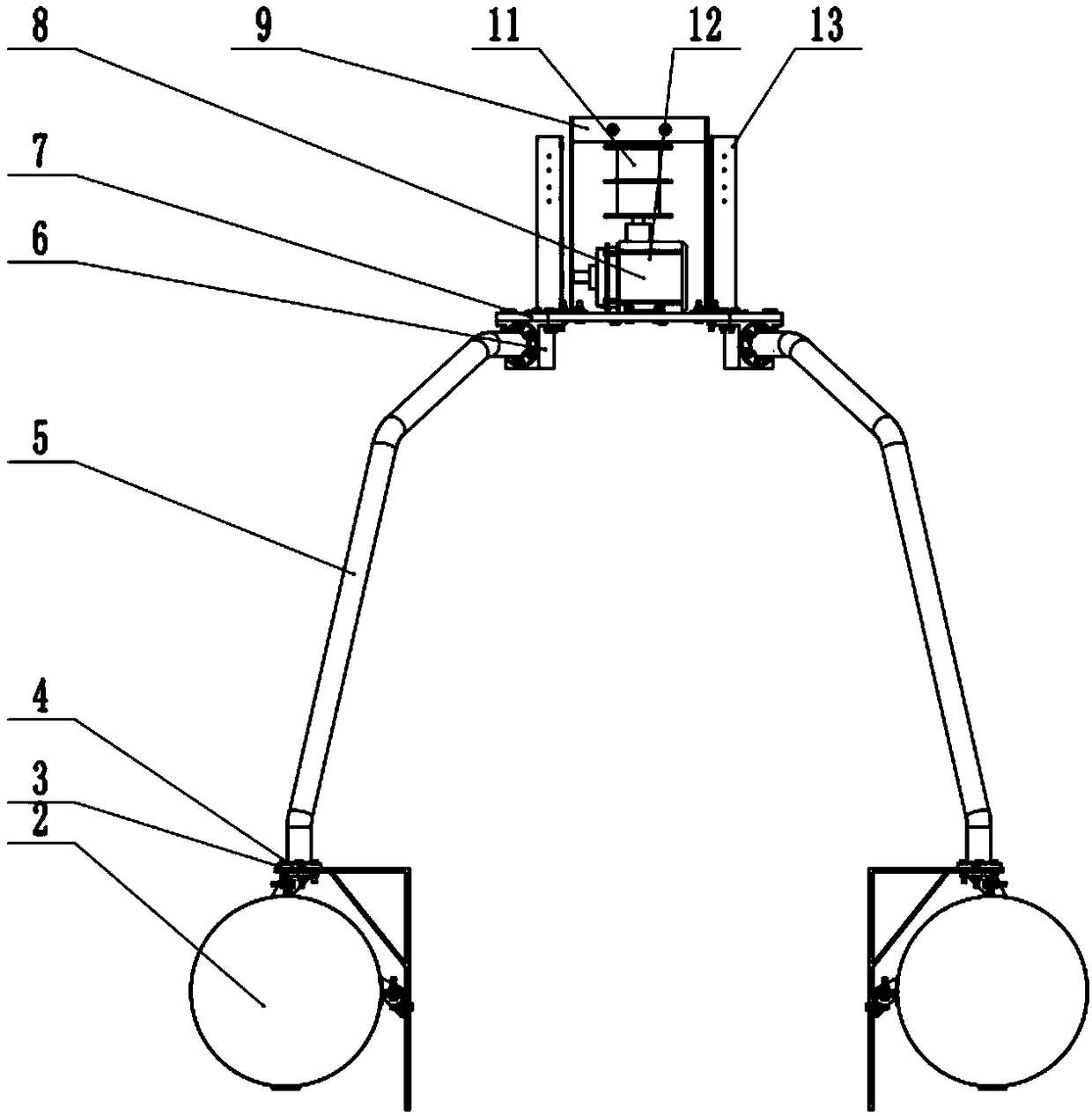
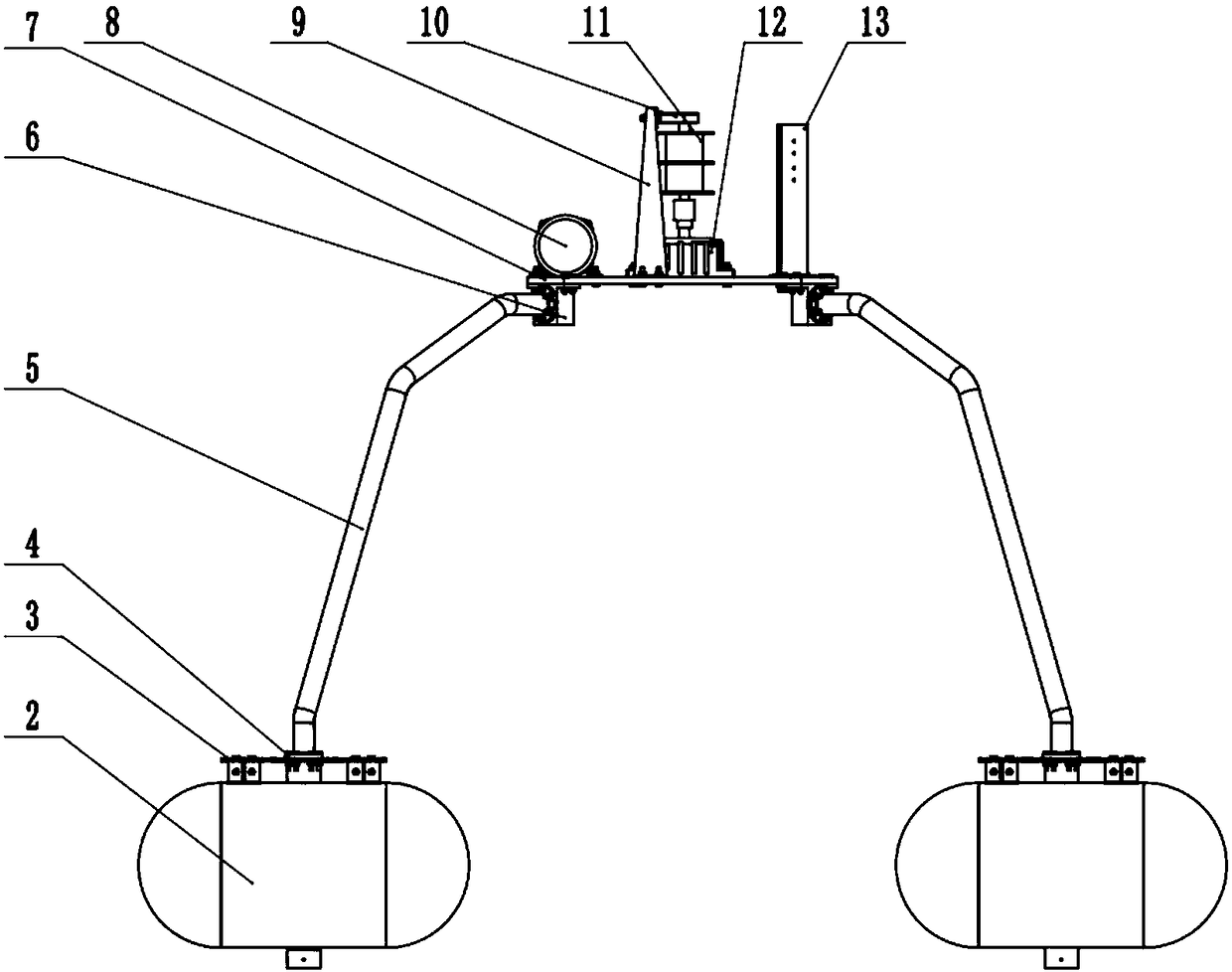
[0026] Such as Figure 1 to Figure 3 As shown, an unmanned surface rescue robot is composed of a main structure, a propulsion system, a buoyancy system, a rescue system and a control system; wherein:
[0027] The main structure is composed of four legs 5 fixed under the support plate 7, and the four legs 5 are respectively connected to the upper support plate 7 through the leg connecting seat 6 to provide a robot working platform;
[0028] The buoyancy system is composed of 4 buoys 2 of capsule structure distributed on the same plane. The 4 buoys are fixedly connected to the 4 outriggers 5 through the buoy connecting frame 3 and the connecting flange 4 respectively, and cannot be moved. The 4 buoys of the main structure Outrigger 5 and support plate 7 are completely fixed and immovable, so that the buoyancy system and the main structure form a stable water surface platform; the buoyancy system provides the required buoyancy for the whole robot.
[0029] The propulsion system ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More