Multi-rotor unmanned aerial vehicle flight control system
A technology of flight control system and multi-rotor UAV, applied in the field of UAV, can solve the problems of low accuracy, achieve high accuracy, avoid low-battery flight, and realize the effect of system acceleration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
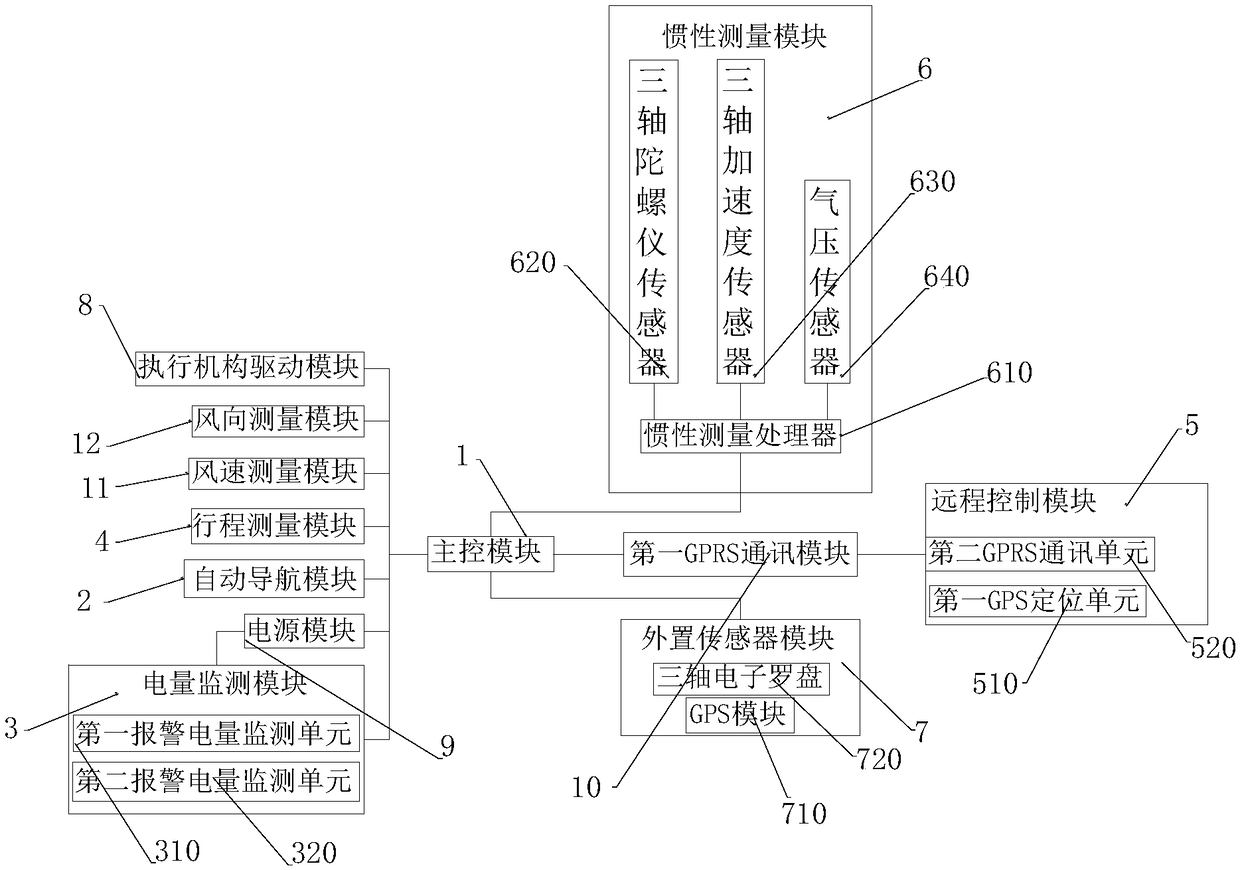
[0016] Such as figure 1 As shown, a multi-rotor UAV flight control system includes a main control module 1, an automatic navigation module 2, a power monitoring module 3, a stroke measurement module 4, a remote control module 5, a wind speed measurement module 11, a wind direction measurement module 12, The actuator drive module 8, the power supply module 9 and the first GPRS communication module 10, the automatic navigation module 2, the wind speed measurement module 11, the wind direction measurement module 12, the stroke measurement module 4 and the actuator drive module 8 are respectively connected to the main control module 1 by communication , the power supply module 9 is used to provide electric energy for ea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com