

Clamping type parking robot
A robot and clamping technology, applied in the field of parking robots, can solve the problems of increased load, increased parking difficulty, and cumbersome design of parking robots, etc., to achieve the effect of reducing the number, increasing the effective scanning area, and improving work adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Below the present invention will be further described in conjunction with the embodiment in the accompanying drawing:
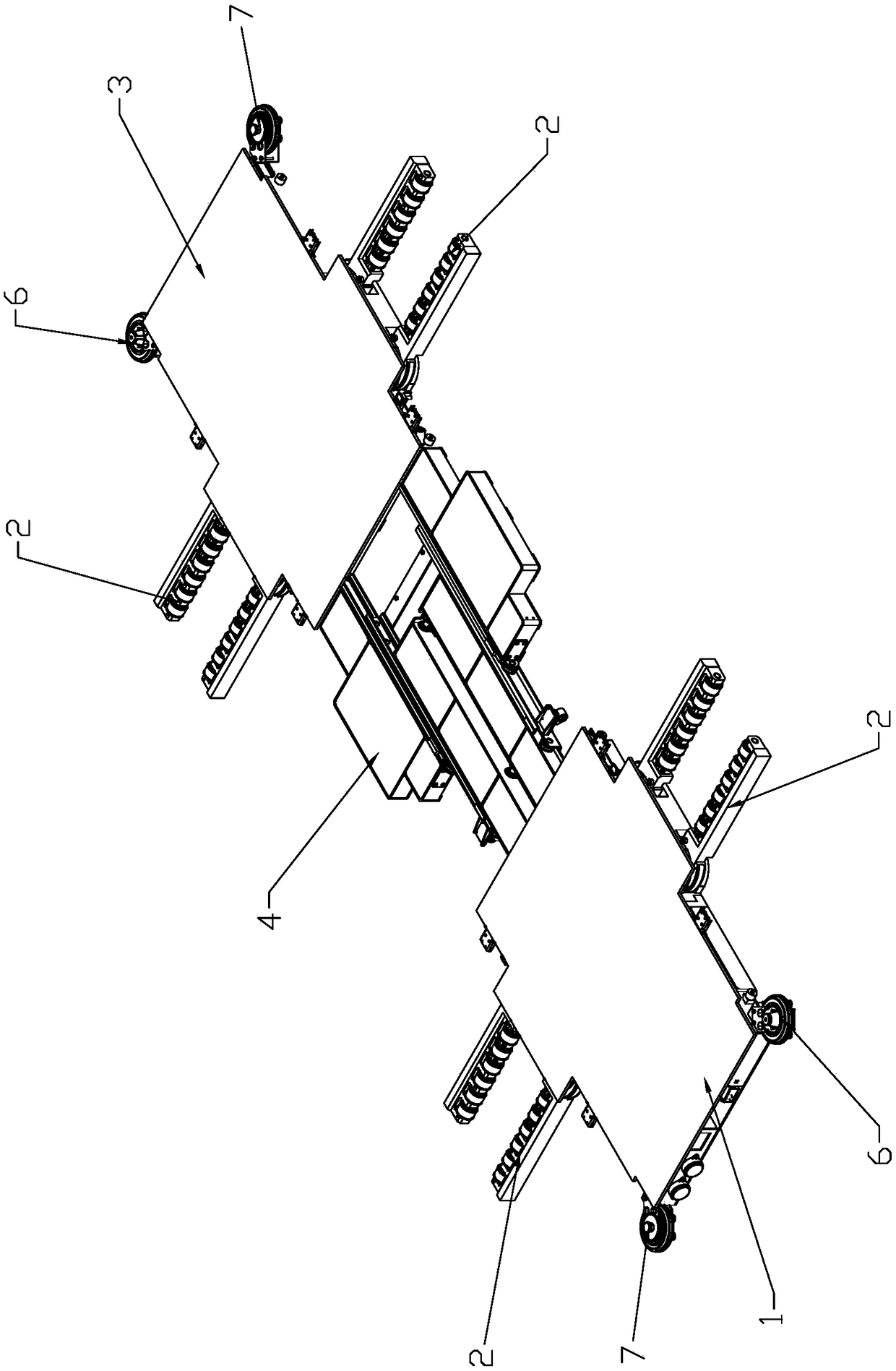
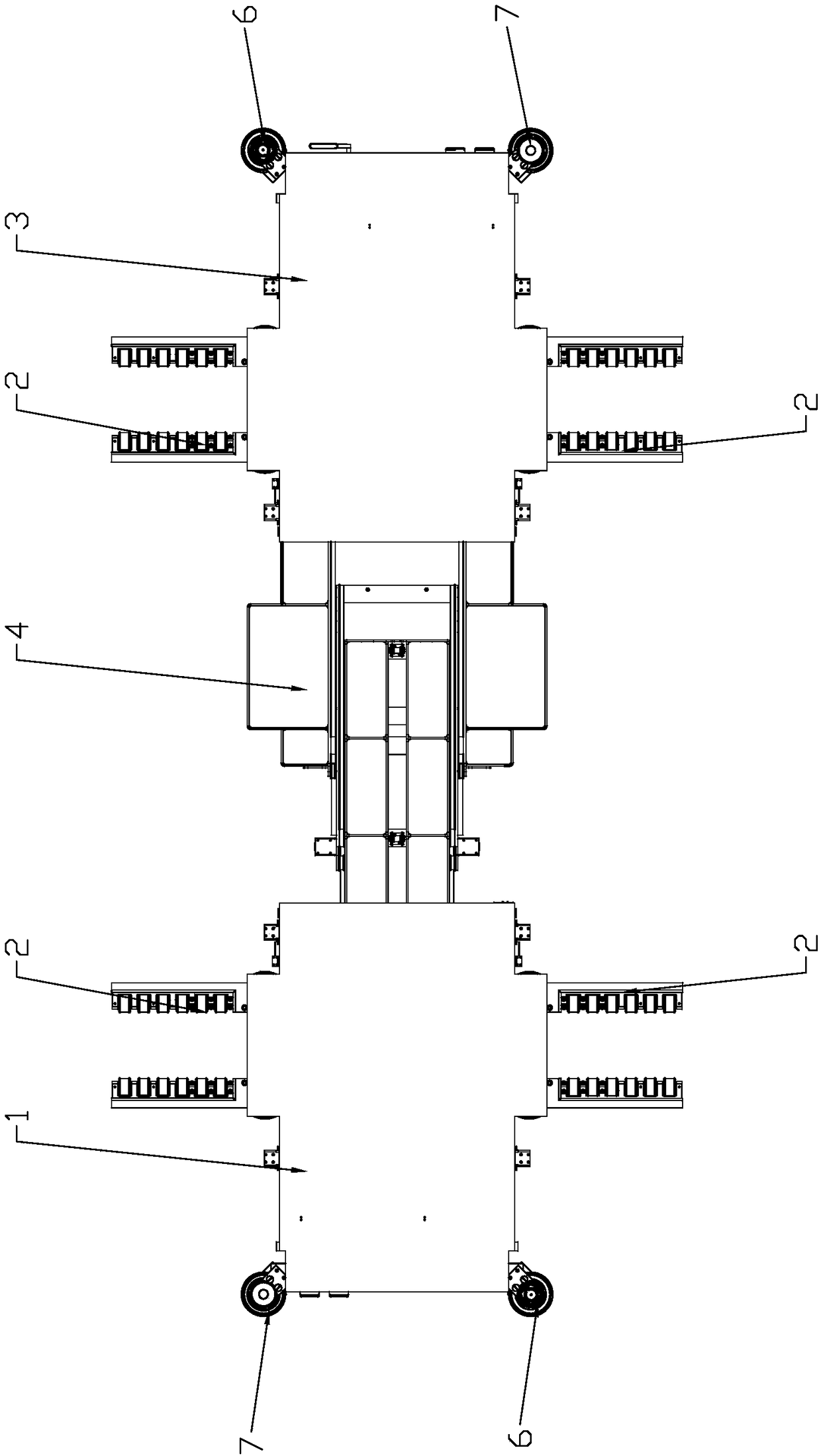
[0028] like Figure 1~3 Shown, the present invention mainly comprises front transport vehicle body 1, rear transport vehicle body 3 and telescopic carriage mechanism 4. The front end of telescopic carriage mechanism 4 is connected to the front transport vehicle body 1, and the rear end is connected to the rear transport vehicle body 3.
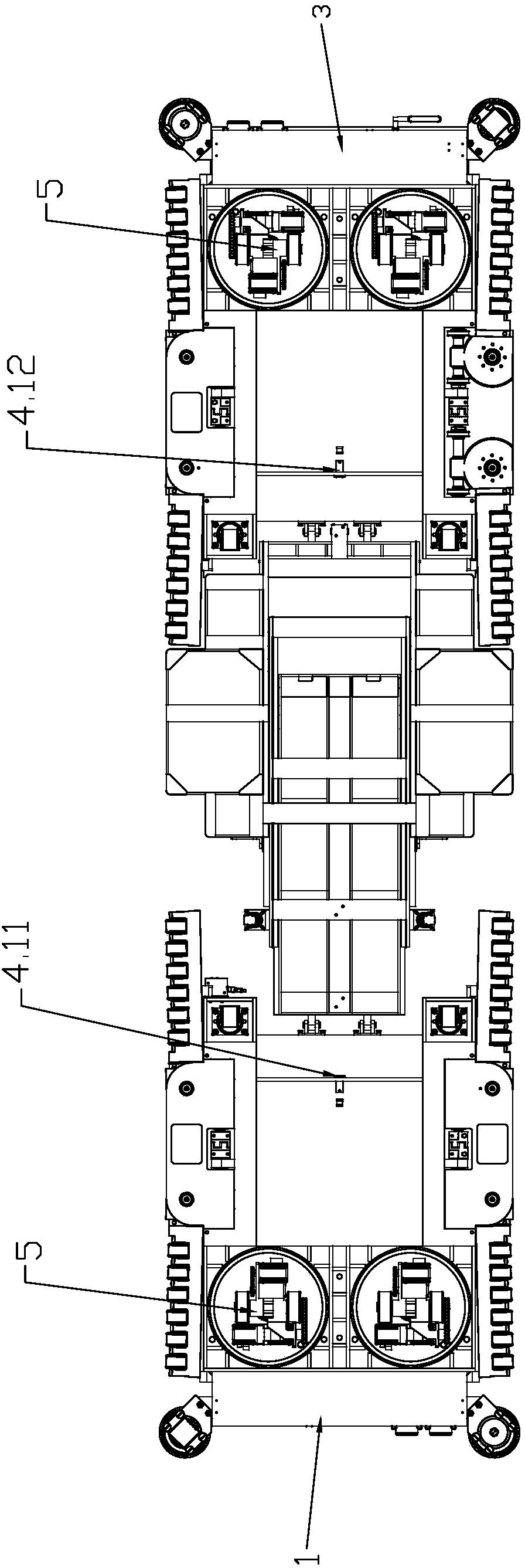
[0029] like Figure 7~8 As shown, the telescopic carriage mechanism 4 includes an inner carriage 4.1, an intermediate carriage 4.2, an outer carriage 4.3, a first support shaft 4.7, a second support shaft 4.8, a third support shaft 4.9, a fourth support shaft 4.10 and For the control line, the left and right sides of the inner carriage 4.1 are provided with inner rollers 4.4, and the inner carriage 4.1 is slidably connected to the inner side of the middle carriage 4.2 through the inner rollers 4.4 on the left and rig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More