

Multi-DOF (degree of freedom) energy-storing foot mechanism
A degree of freedom and foot technology, applied in passive exercise equipment, physical therapy, etc., can solve problems such as single degree of freedom, inconvenient wearing, complex structure, etc., and achieve the effect of reducing energy loss, flexible and small paths, and small volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with accompanying drawing.
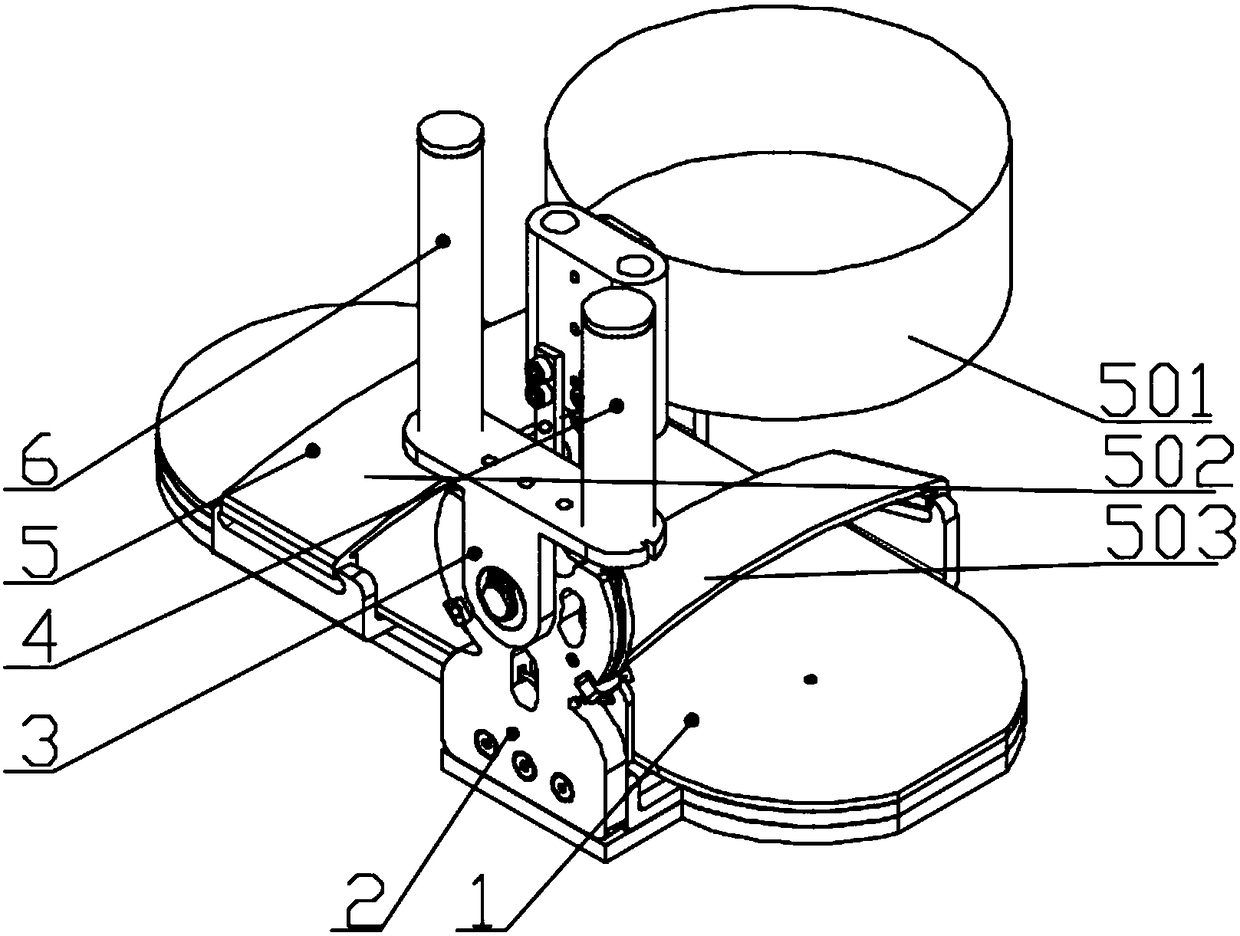
[0025] like figure 1 As shown, the multi-degree-of-freedom energy storage foot mechanism includes a foot unit 1, a side plate unit 2, an ankle joint unit 3, and a binding unit 5. The ankle joint unit 3 is detachable from the side plate unit 2 and the foot unit 1 through screws. connection, the binding unit 5 can be detachably connected with the sole unit 1 and the ankle joint unit 3, the ankle joint unit 3 includes an ankle support base 301, and the ankle joint support base 301 includes an integrally formed support platform and hanging ears. There is a through hole, and the ankle joint toe flexion and dorsiflexion shaft 302 and the bearing are installed in the through hole so that the ankle joint support seat 301 is rotatably assembled in the side plate unit 2, and the support table is detachably connected to the energy storage unit, and the energy storage unit includes a p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More