

Transcranial magnetic stimulation navigation positioning robot system and positioning method
A robot system, transcranial magnetic stimulation technology, applied in surgical navigation systems, surgical robots, magnetic therapy, etc., can solve the problem of not being able to monitor the patient's position in real time and accurately adjust the position of the coil, the area that cannot be treated and the actual coil stimulation Problems such as area overlap, inability to monitor the position of the patient in real time, adjust the position of the coil, etc., so as to avoid the deviation of the treatment area, reduce the medical risk, and improve the treatment accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention is described in further detail now in conjunction with accompanying drawing. These drawings are all simplified schematic diagrams, which only illustrate the basic structure of the present invention in a schematic manner, so they only show the configurations related to the present invention.
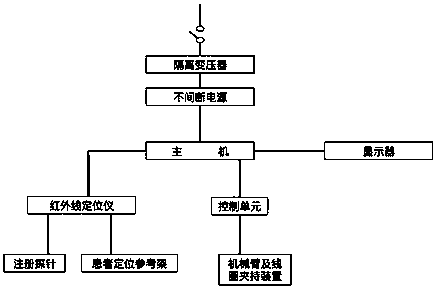
[0043] like figure 1 As shown, the present invention provides a transcranial magnetic stimulation navigation and positioning robot system, which mainly includes: a host, an infrared locator, a patient positioning reference frame, a registration probe, a robotic arm and a coil clamping device, and a control unit; the host and The control unit and the infrared locator are connected; the infrared locator is connected with the registration probe and the patient positioning reference frame (wired connection or wireless connection can be used); the infrared locator is used for real-time positioning of the patient positioning reference frame and registration The posit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More