

Bridge crane anti-swing control method based on neural network PID
A bridge crane and neural network technology, applied in the field of anti-sway positioning control system of bridge crane, can solve the problems of increased wear on the side of the track, offset of the center of gravity of the vehicle, and complex operating environment of the crane, and achieve the goal of eliminating swing and precise positioning Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
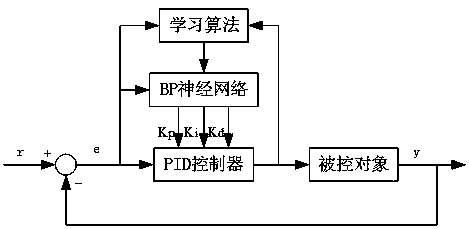
[0050] In order to make the technical solution and advantages of the present invention clearer, the technical solution will be clearly and completely described below in conjunction with the accompanying drawings of the present invention. The invention combines the BP neural network with the traditional PID control, utilizes the powerful approximation ability of the neural network, can adjust the PID parameters online and in real time through learning, so that the controller can adapt to the structural parameters of the controlled object and the change of the environment.
[0051] Such as Figure 1-Figure 4 The shown bridge crane anti-sway control method based on neural network PID is characterized in that comprising the steps:
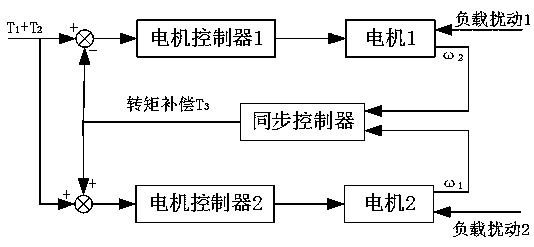
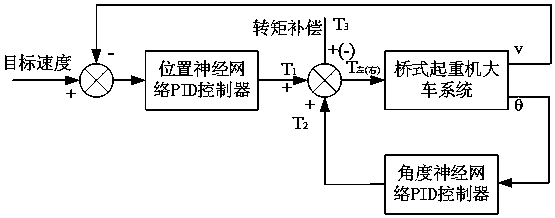
[0052] Step 1. The target speed curve of the overhead crane cart is given, and the overhead crane cart moves according to the given target speed curve; the motor controller controller simulates the ideal driving process of the driver according to the t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More