

Barrier detection early-warning system based on monocular and binocular vision fusion
An obstacle detection and early warning system technology, applied in the field of image processing, can solve problems such as large time complexity, and achieve the effect of reducing program running time and improving practicability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0060] The technical solutions of the present invention will be described in further detail below through specific implementation methods.
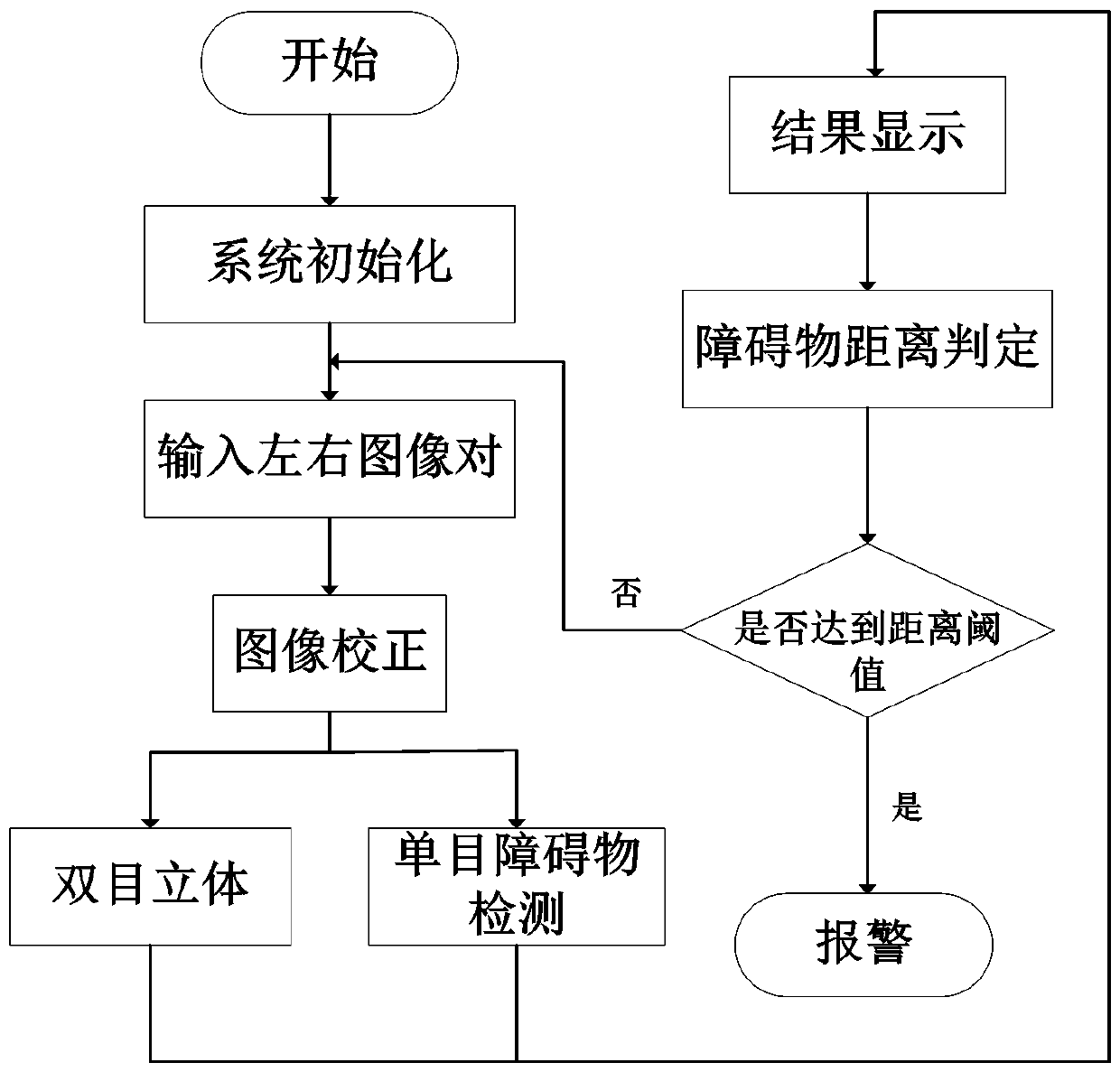
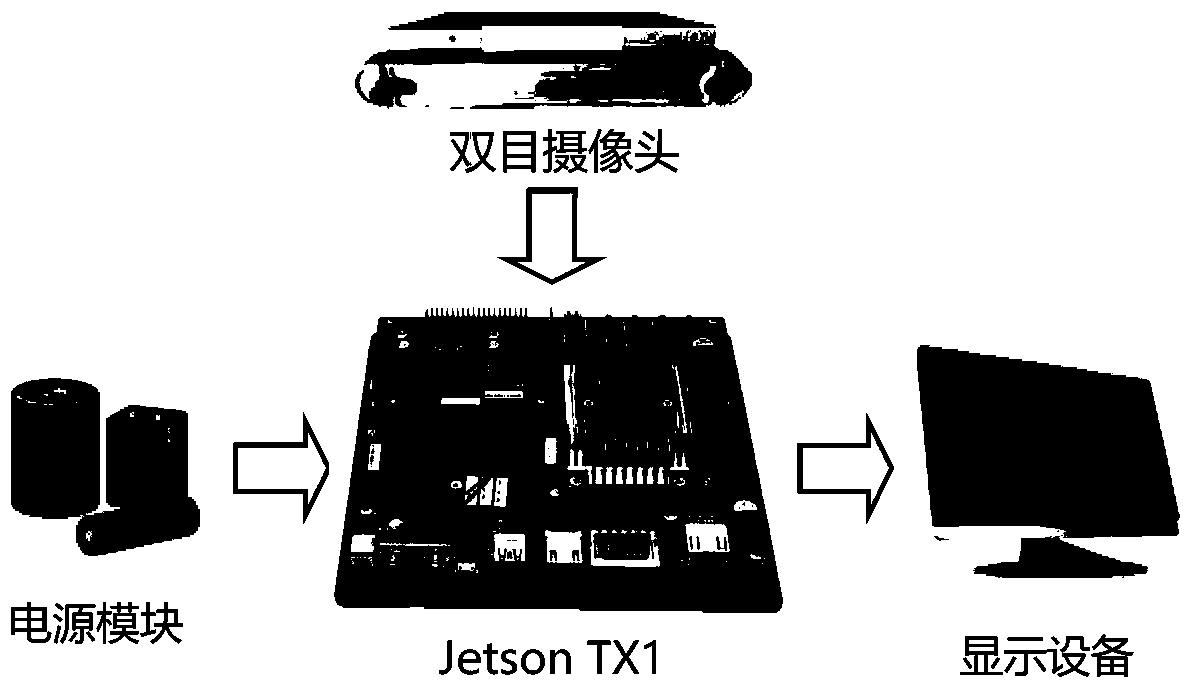
[0061] Such as figure 1 and figure 2 As shown, the present invention provides an obstacle detection and early warning system based on single and binocular vision fusion, including a binocular camera, a display device, a power module and JetsonTX1, and realizes obstacle detection and early warning through the following steps:
[0062] 1) According to the input left and right original images, use the calibrated camera information to perform image correction to obtain line-aligned left and right image pairs. The binocular camera is first calibrated to obtain its internal and external parameters for subsequent image correction operations. Table 1 shows that the internal parameters of the camera include the focal length (f x ,f y ), principal point position (x 0 ,y 0 ), radial distortion (k 1 ,k 2 ) and tangential distortion (p 1 ,p ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More