Micro-macro two-stage driver and control method thereof
A driver and coil bobbin technology, applied in the field of macro-micro two-stage driver and its control, can solve the problems of small output force of piezoelectric ceramic driver, difficult to meet the needs of heavy loads, and connection error of macro-micro two-stage driver, and achieve output The effect of large force, simple structure and no connection error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
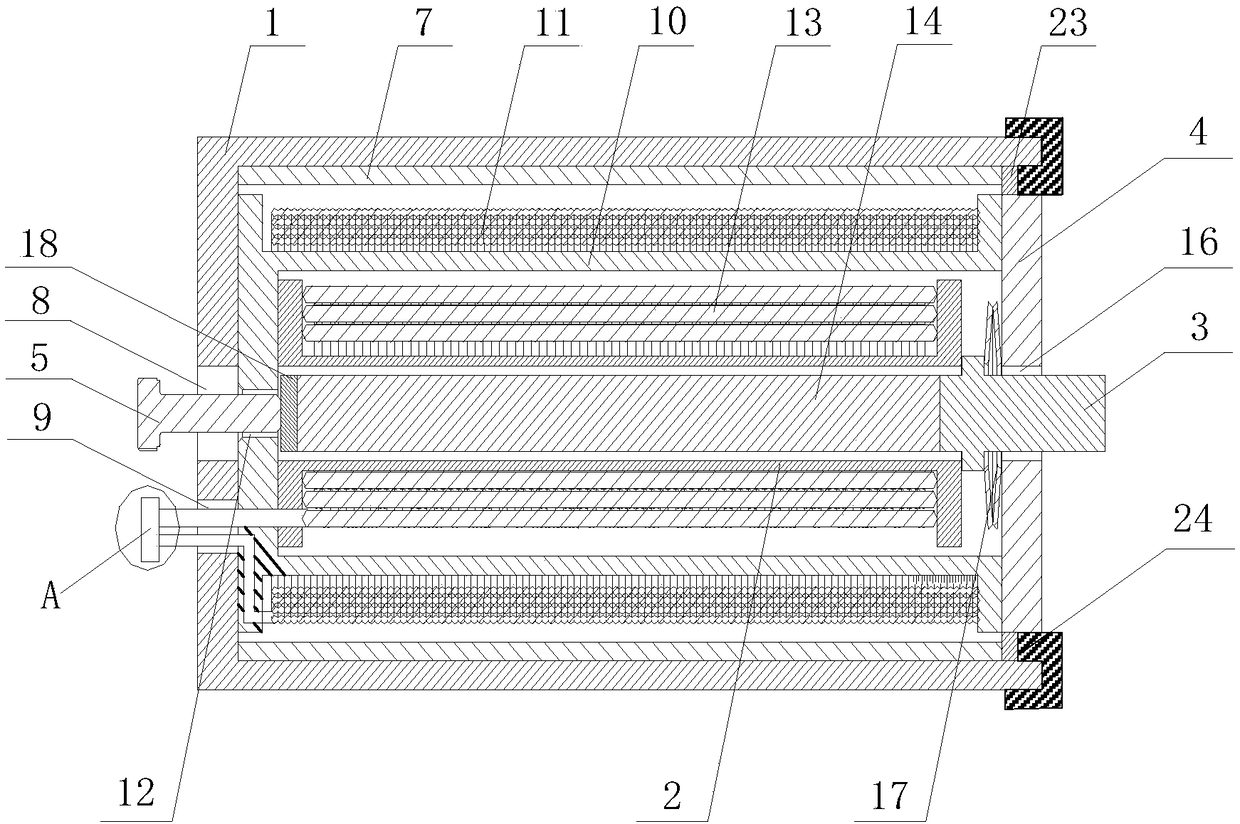
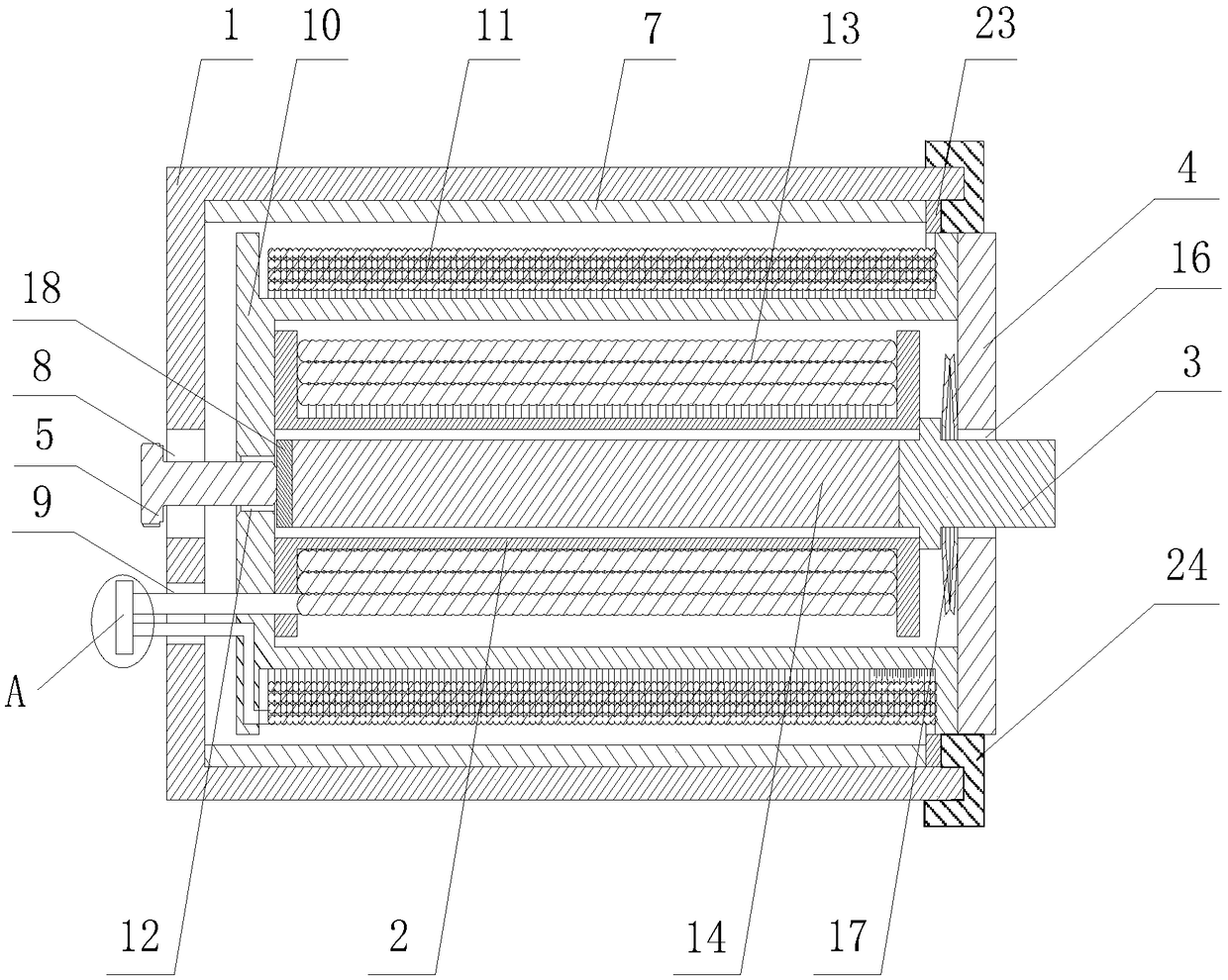
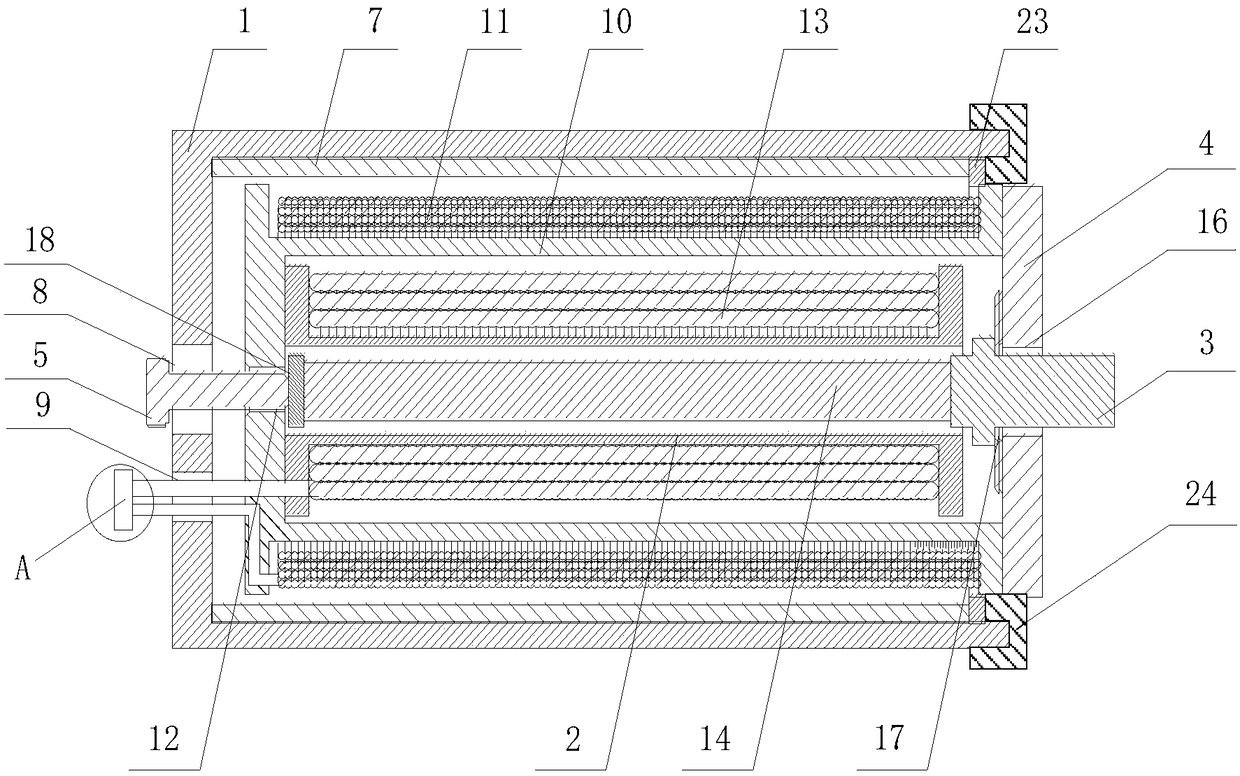
[0027] see Figure 1-6 , the present invention provides a technical solution: a macro and micro two-stage driver, including a housing 1, a second bobbin 2, an output rod 3, an end cover 4, a pre-tightening screw 5 and a terminal 6, and the housing 1 is internally installed There is a permanent magnet cylinder 7, and a circular hole 8 is opened in the center of one side of the shell 1, and a power transmission hole 9 is opened on one side of the circular hole 8...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More