Non-contact type robot laser welding teaching method
A technology of laser welding and teaching method, which is applied in the direction of welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve the problems of trajectory deviation and cumbersome process, improve efficiency, reduce the possibility of interference, and teach Simple and fast effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in further detail below in conjunction with the accompanying drawings.
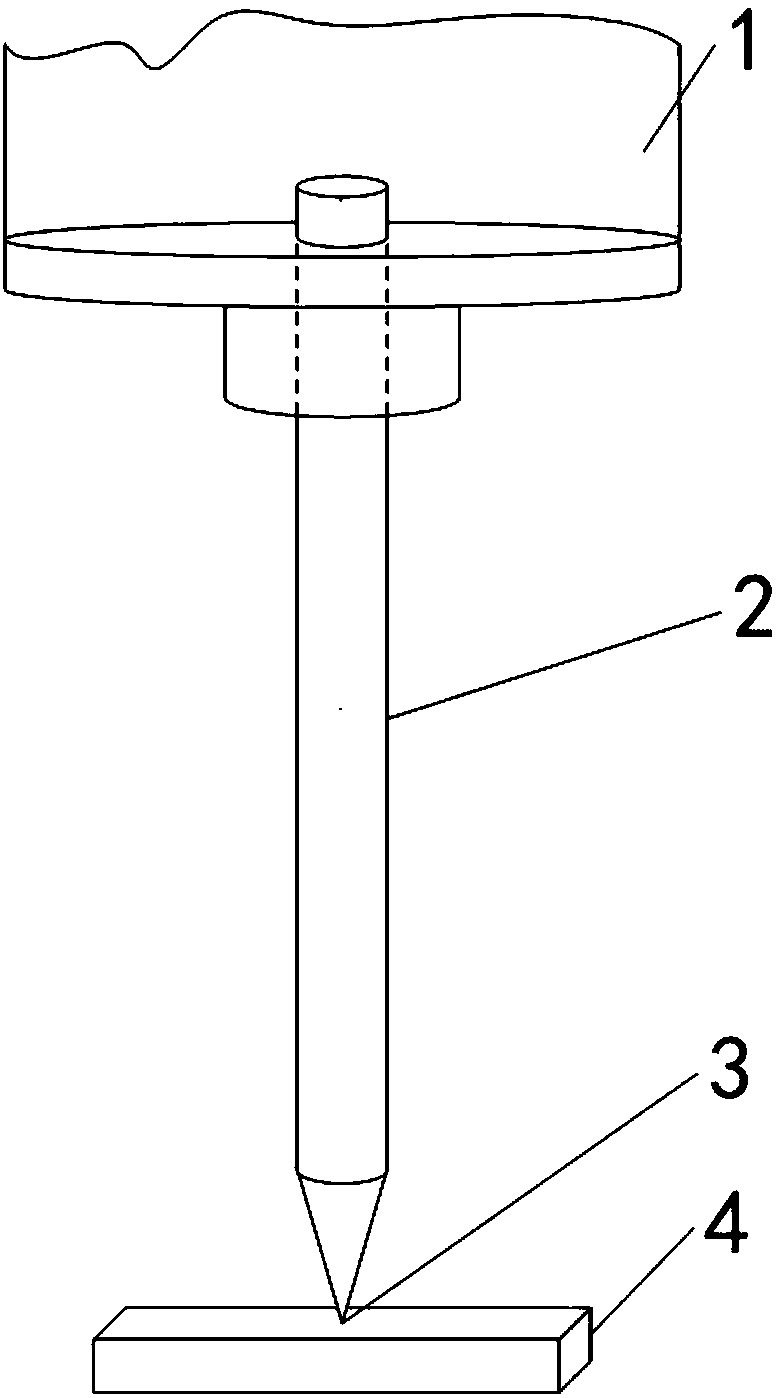
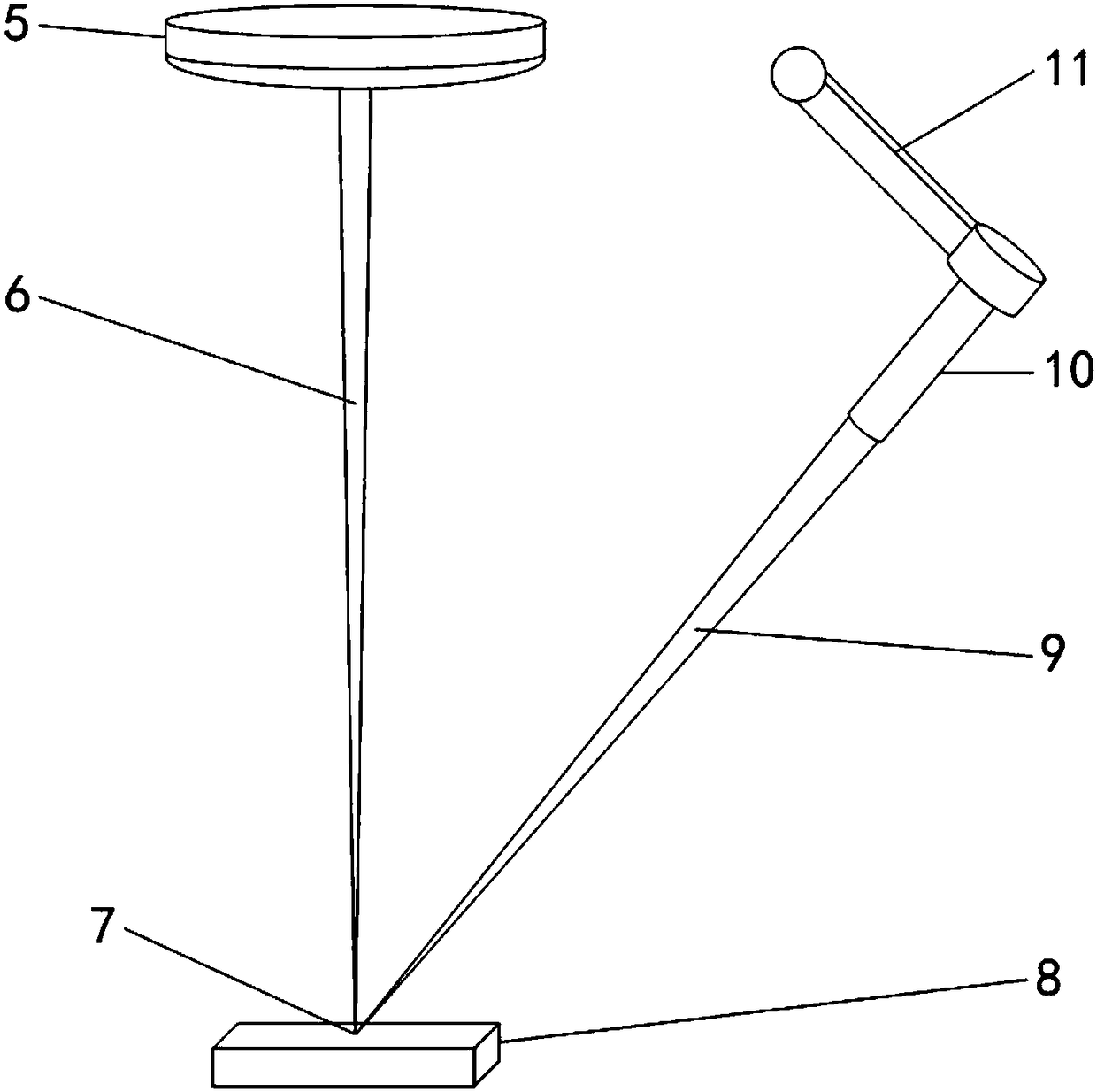
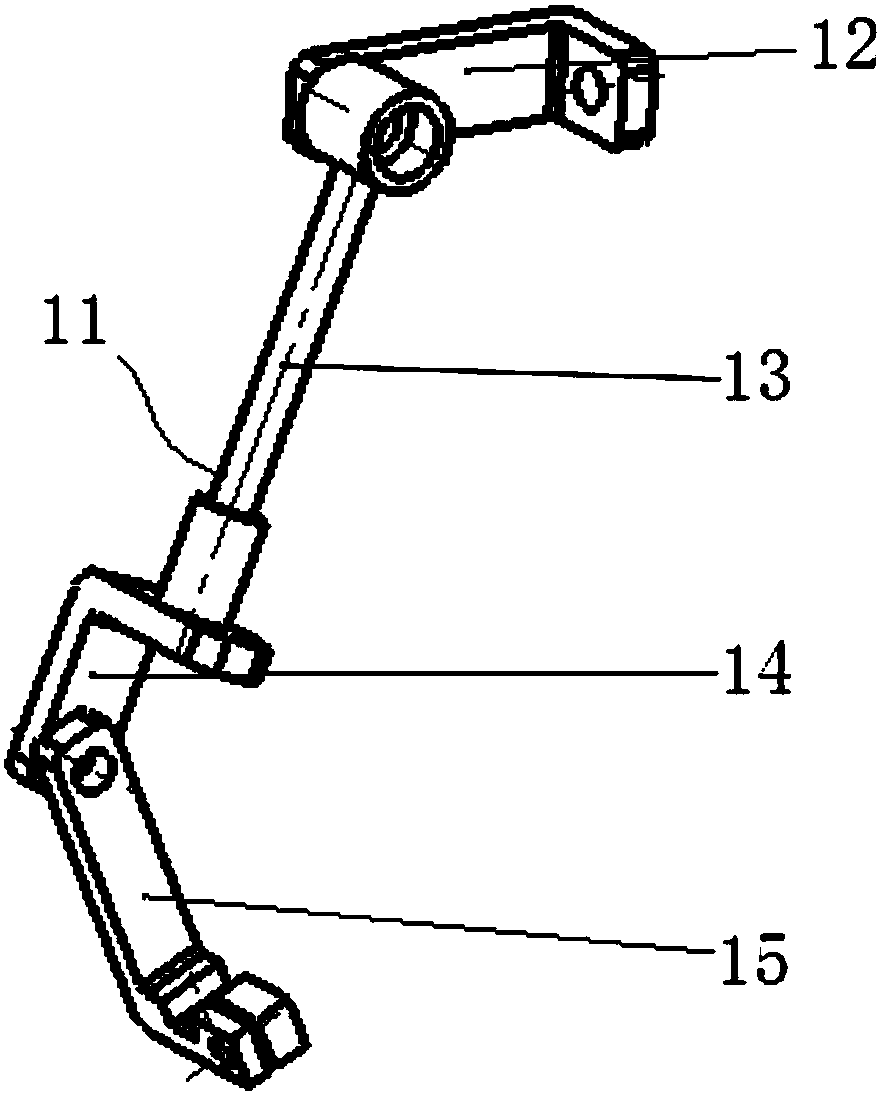
[0022] The present invention includes a robot, a teaching thimble 2, a calibration plane 4, a space multi-degree-of-freedom adjustment frame 11, a welding laser 5 and an auxiliary laser generator 10, wherein image 3 As shown, the space multi-degree-of-freedom adjustment frame 11 includes an adjustment frame fixing base 12, an adjustment frame arm 13, an adjustment frame elbow joint 14 and an adjustment frame clamping head 15, and the adjustment frame fixing base 12 is rotatable Installed on one side of the welding laser 5, the fixed base 12 of the adjustment frame, the big arm 13 of the adjustment frame, the elbow joint 14 of the adjustment frame and the clamping head 15 of the adjustment frame are sequentially rotated and connected, so that the whole mechanism has a total of 4 degrees of freedom in space, And the rotation joints of the various parts are all...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com