

Mechanical decoupling single-hole surgery robot rapid replacement mechanism with prismatic joint
A single-port surgery, robotic technology, applied in surgical manipulators, surgical robots, surgery, etc., can solve the problems of scattered structure and large size, and achieve the effect of reasonable layout, easy adjustment and accurate positioning.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
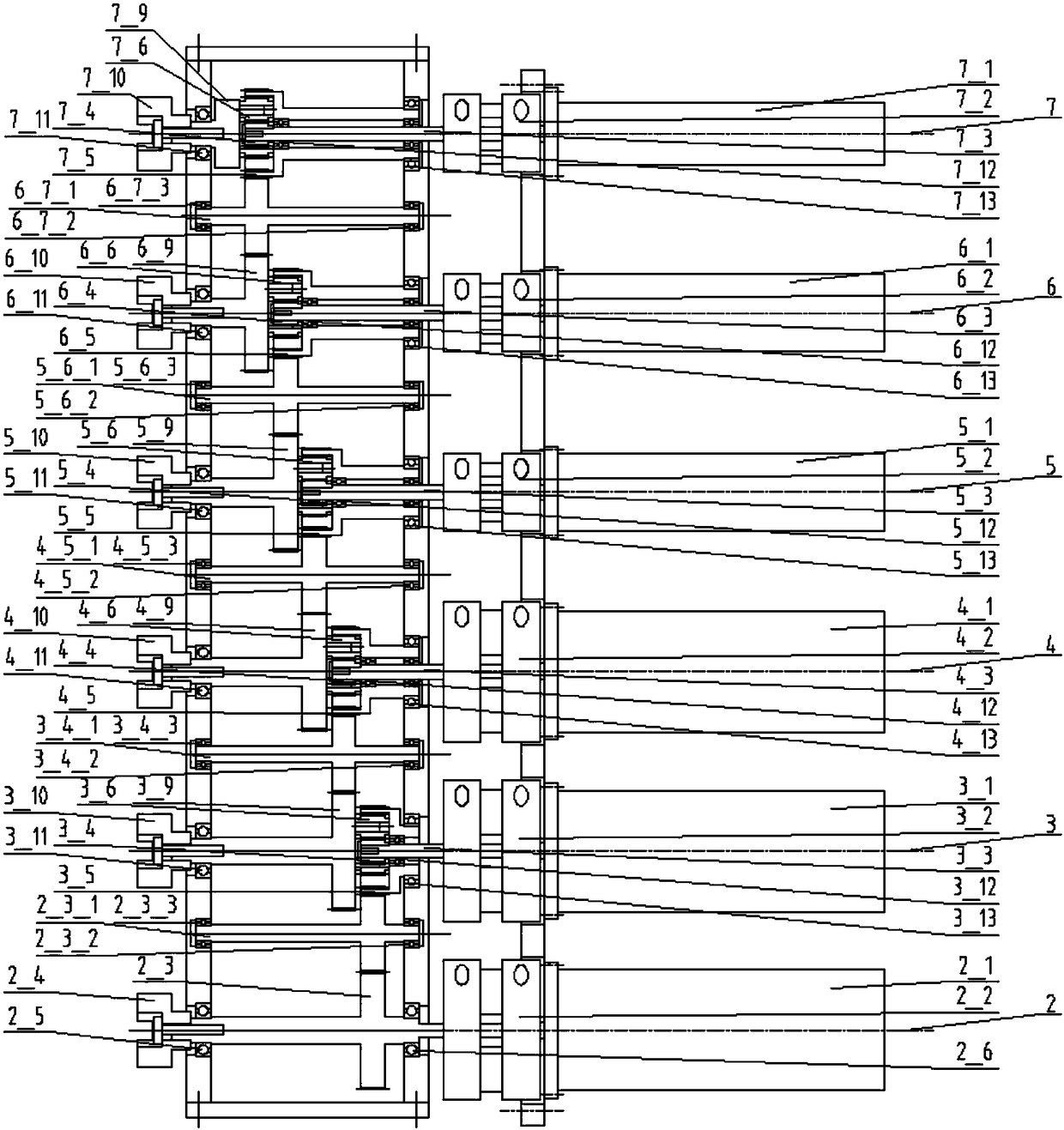
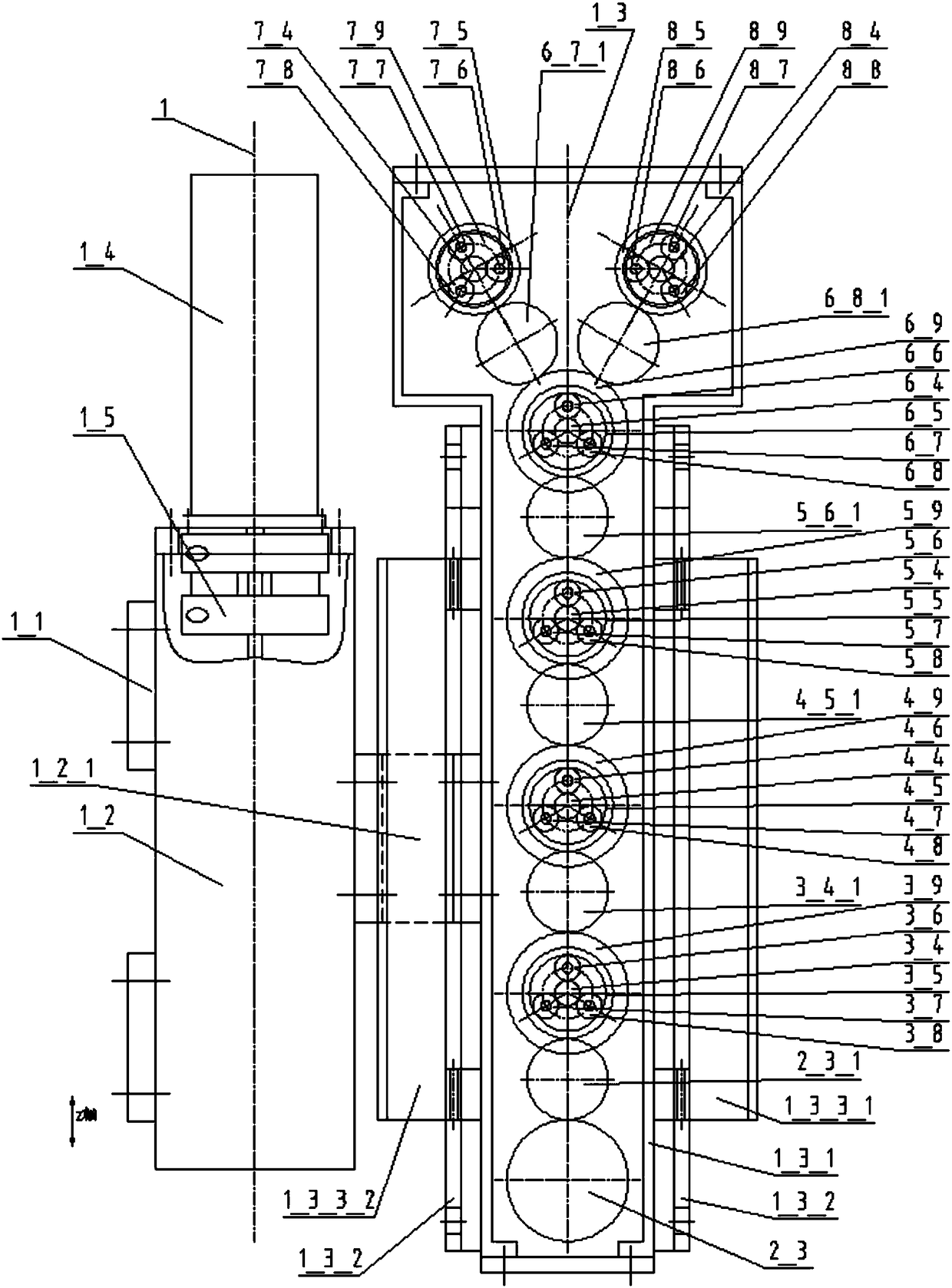
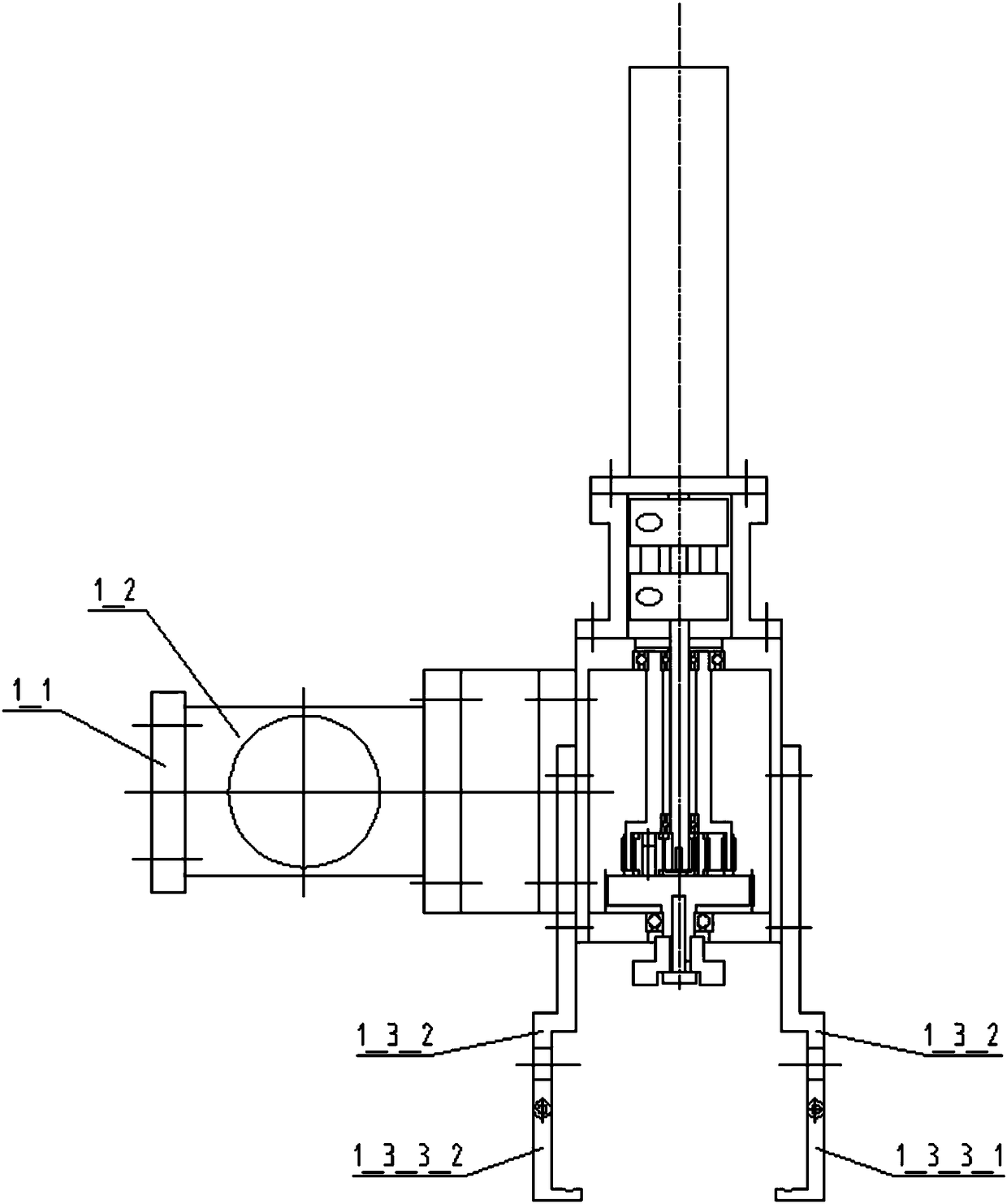
[0061] combine Figure 1 ~ Figure 3 , Figure 6 ~ Figure 9 , Figure 14 ~ Figure 18 To illustrate this embodiment, the mechanical decoupling quick-change mechanism with moving joints for minimally invasive surgery single-hole surgery robot includes a fixed base 1_1, and the first joint drive installed on the fixed base 1_1 Mechanism 1, second joint driving mechanism 2, third joint driving mechanism 3, fourth joint driving mechanism 4, fifth joint driving mechanism 5, sixth joint driving mechanism 6, seventh joint driving mechanism 7 and eighth joint driving mechanism 8 and so on.
[0062]The first joint driving mechanism 1 is fixedly connected to the fixed seat 1_1 through a ball screw mechanism 1_2, and the second joint driving mechanism 2, the third joint driving mechanism 3, the fourth joint driving mechanism 4, and the fifth joint The driving mechanism 5, the sixth joint driving mechanism 6, the seventh joint driving mechanism 7 and the eighth joint driving mechanism 8 ...
Embodiment 2
[0120] combine Figure 10 ~ Figure 13 To illustrate this embodiment, on the basis of the technical solution of Example 1, the layout of the quick-change mechanism with mechanical decoupling of moving joints used in minimally invasive surgical single-hole surgical robots can be changed to an additional Figure 10 ~ Figure 13 in the structure. That is to say, the layout of the mechanically decoupled quick-change mechanism for the minimally invasive surgery single-hole surgical robot with moving joints in the technical solution of the first embodiment is adjusted to the technical solution of the second embodiment, and at the same time, the transmission of the surgical instrument actuator M The layout of the box is also adjusted to the technical solution of the second embodiment, which can also be correctly driven and mechanically decoupled.
[0121] The above-mentioned quick-change mechanism N with mechanical decoupling of moving joints for minimally invasive surgical single-hol...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More