

Direct-current brushless motor self-adaptive inversion slip form control method based on non-linear interference observer
A brushless DC motor, interference observer technology, applied in observer control, AC motor control, electronic commutation motor control, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0129] The present invention will be further described below in conjunction with the accompanying drawings.
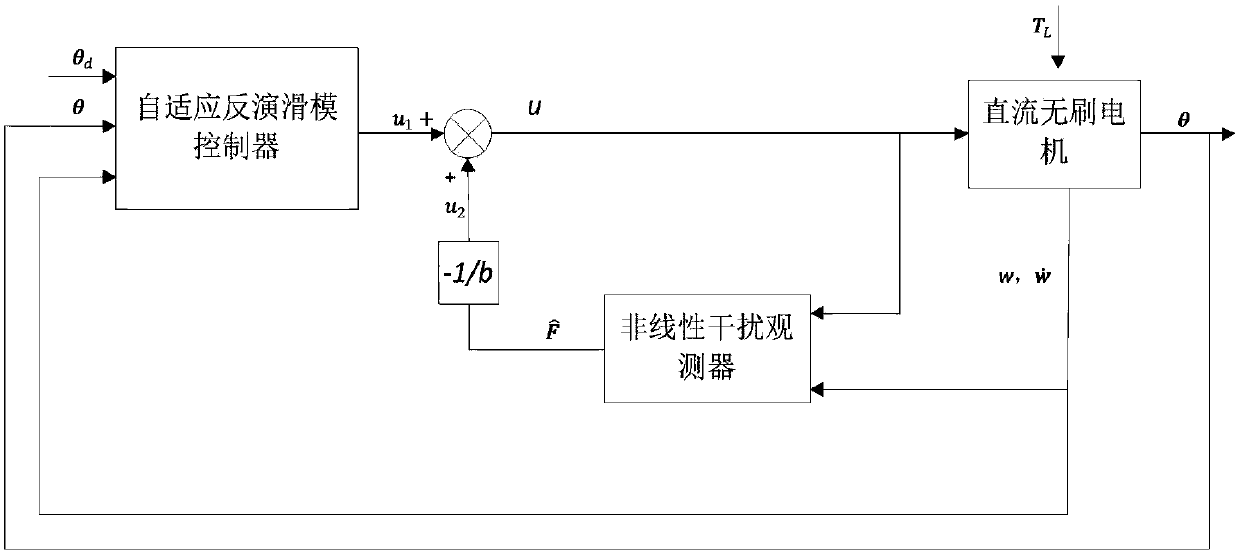
[0130] An adaptive inversion sliding mode control system for brushless DC motor based on nonlinear disturbance observer, as shown in Figure 1, the nonlinear disturbance observer estimates the total disturbance of brushless DC motor according to the state of the motor and the control voltage and compensate for the total disturbance. Finally, combined with the adaptive inversion sliding mode controller, the control voltage of the motor is obtained, and the brushless DC motor is controlled to track the position given signal x d .
[0131] Above-mentioned technical scheme, concrete realization comprises the following steps:
[0132] Step 1. Establish the mathematical model of the brushless DC motor
[0133] The mechanical equation of motion for a brushless DC motor is:
[0134]
[0135] In the formula: T e is the electromagnetic torque, T e =k t I(t),k t is the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More