

Application of an Adaptive Ant Colony Algorithm in Path Planning of Mobile Robots
A mobile robot, ant colony algorithm technology, applied in the direction of adaptive control, instrumentation, general control system, etc., can solve the problems of long selection method, easy to fall into deadlock environment path point search time, lack of global measurement information, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0091] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0092] In the present invention, the adaptive ant colony algorithm and the standard ant colony algorithm are referred to as AACO and ACO respectively.
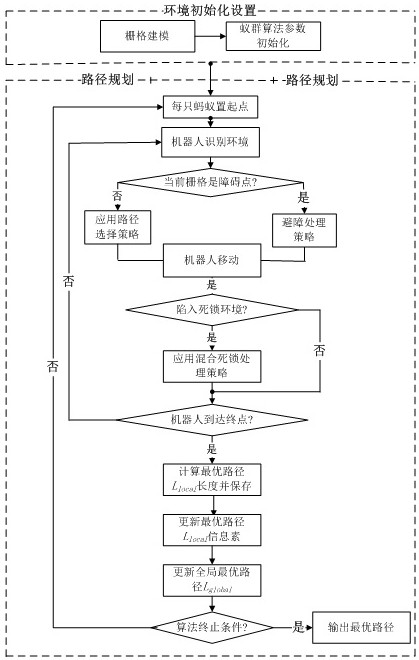
[0093] The present invention provides an application method and system of an adaptive ant colony algorithm (AACO) in path planning of a mobile robot. Deadlock Handling Strategies The three core issues are respectively designed point-to-point adaptive path selection strategy, obstacle avoidance planning strategy and hybrid deadlock handling strategy.
[0094] Among them, the point-to-point adaptive path selection strategy can effectively select the path point according to t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More