

Horizontal and vertical coordination control method for trajectory tracking of intelligent vehicle
A technology of intelligent vehicle and coordinated control, which is applied in the direction of control devices, can solve problems such as the inability of the vehicle to maintain stability, achieve the effect of solving dynamic constraints, realizing longitudinal speed tracking control, and improving lateral stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0068] The technical solutions in the embodiments of the present invention will be described clearly and in detail below with reference to the drawings in the embodiments of the present invention. The described embodiments are only some of the embodiments of the invention.
[0069] The technical scheme that the present invention solves the problems of the technologies described above is:
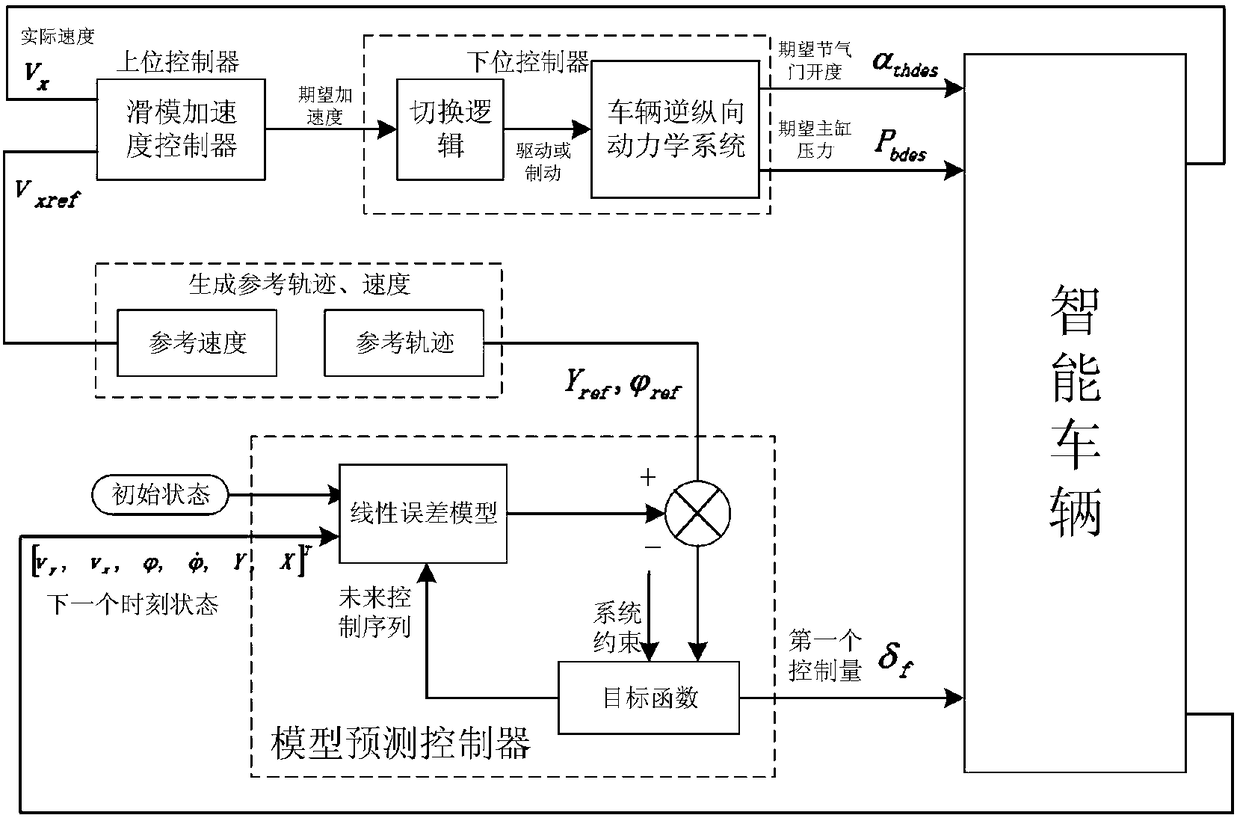
[0070] The horizontal and vertical coordinated control method for intelligent vehicle track following in the present invention, based on model predictive control, sliding mode control theory and inverse longitudinal dynamics, designs a horizontal and vertical coordinated control system for intelligent vehicle track following, realizing engine throttle Coordinated control of opening, brake master cylinder pressure and front wheel deflection angle. The longitudinal control adopts a layered control structure, and the upper and lower controllers are designed to realize the longitudinal speed tr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More