

Inverse kinematics solving method and device for service robot in intelligent space
A service robot and inverse kinematics technology, applied in the field of robot intelligent control, can solve the problems of not being able to satisfy the control system, not being able to adapt to the increase of the robot's degree of freedom, and slowing down the convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0059] This embodiment discloses a service robot platform and an inverse kinematics solution method in an intelligent space, such as figure 1 shown, including the following steps:
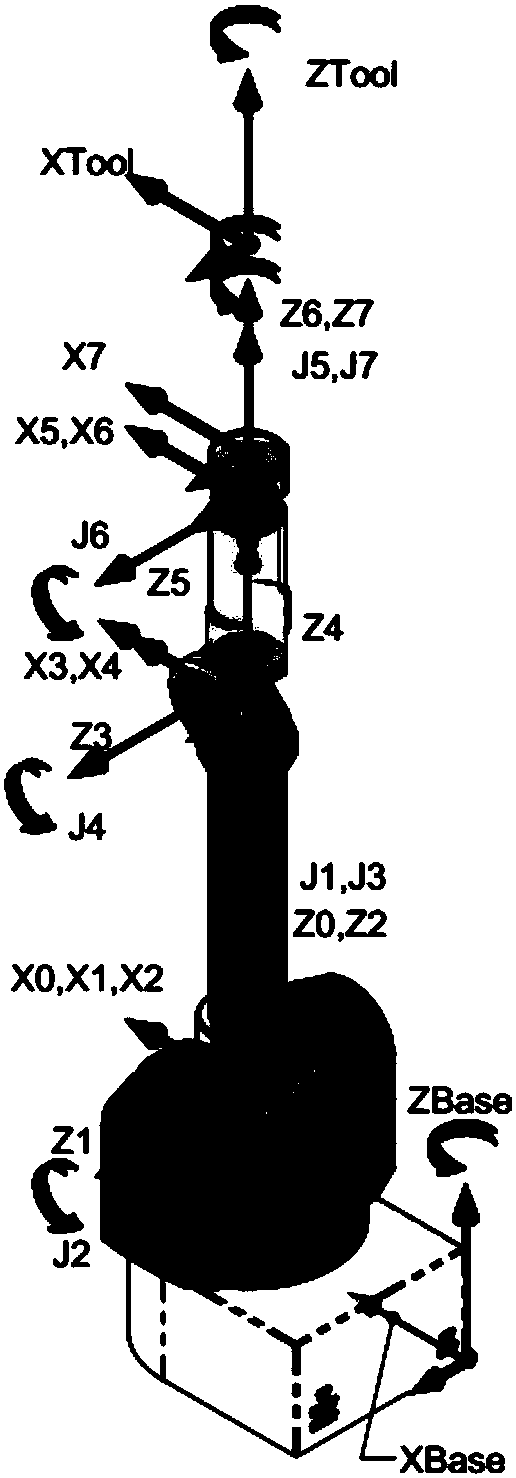
[0060] Step 1: Use the D-H parameter method to establish the forward kinematics model of the robot;
[0061] According to the joint composition and characteristics of the robot, each joint has a reference coordinate system, and then the transformation matrix between adjacent joint coordinate systems is obtained. If the number of joints of the robot is n, and θ 1 , θ 2 ,...,θ n are the values of the n joint variables respectively. Let the transformation matrix between the coordinate system of the (k-1)th joint and the kth joint be
[0062]
[0063] In the formula, is the attitude transformation matrix; is the position transformation matrix.
[0064] Will Multiply, get
[0065]
[0066] In the formula, is the pose matrix of the end effector relative to the base coordinate syste...
Embodiment 2
[0164] The purpose of this embodiment is to provide a computing device.
[0165] A device for solving inverse kinematics of a service robot in an intelligent space, comprising a memory, a processor, and a computer program stored in the memory and operable on the processor. When the processor executes the program, the following steps are implemented, including:
[0166] The forward kinematics model of the robot is established by using the D-H parameter method;
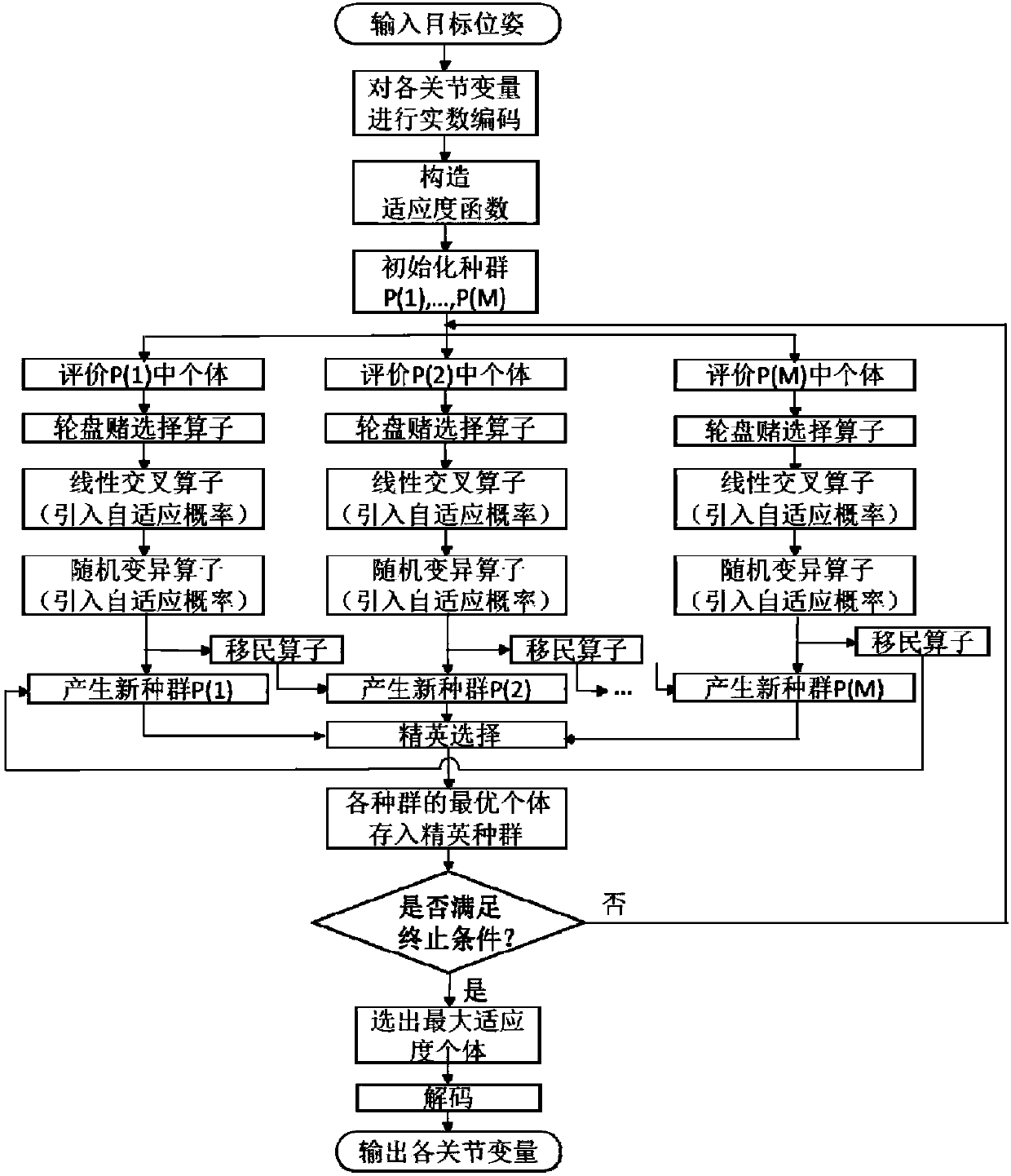
[0167] Encode the joint variables of the robot in real numbers and convert them into individuals in the genetic algorithm;
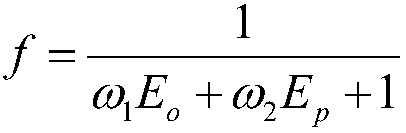
[0168] Taking the difference between the current pose and the target pose as the optimization goal, construct a fitness function;
[0169] The genetic algorithm is used to optimize the joint variables to obtain the optimal solution of the inverse kinematics problem.
Embodiment 3
[0171] The purpose of this embodiment is to provide a computer-readable storage medium.
[0172] A computer-readable storage medium, on which a computer program is stored, and when the program is executed by a processor, the following steps are performed:
[0173] The forward kinematics model of the robot is established by using the D-H parameter method;
[0174] Encode the joint variables of the robot in real numbers and convert them into individuals in the genetic algorithm;
[0175] Taking the difference between the current pose and the target pose as the optimization goal, construct a fitness function;
[0176] The genetic algorithm is used to optimize the joint variables to obtain the optimal solution of the inverse kinematics problem.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More