Mechanical leg capable of drilling wall and robot based on same
A technology of mechanical legs and mechanical swinging devices, applied in the field of robotics, can solve the problems of no obstacle-clearing function, obstacle-clearing function but large volume, etc., and achieve the effect of small overall structure, convenient use and high integration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
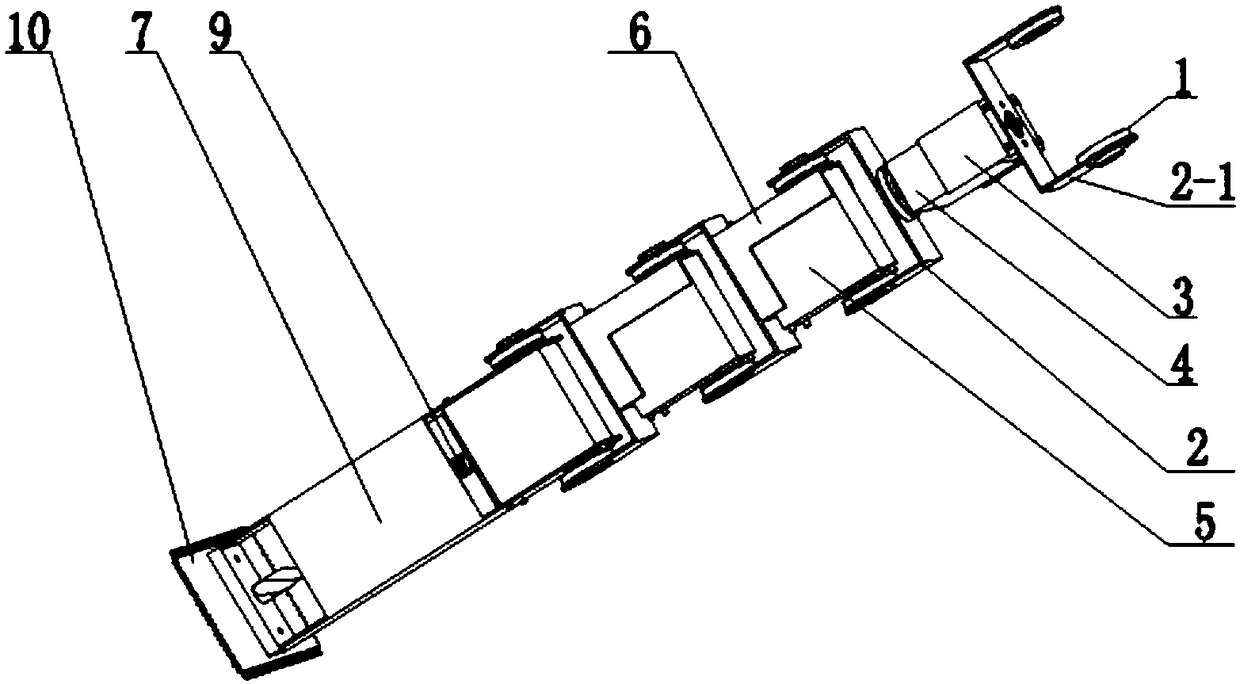
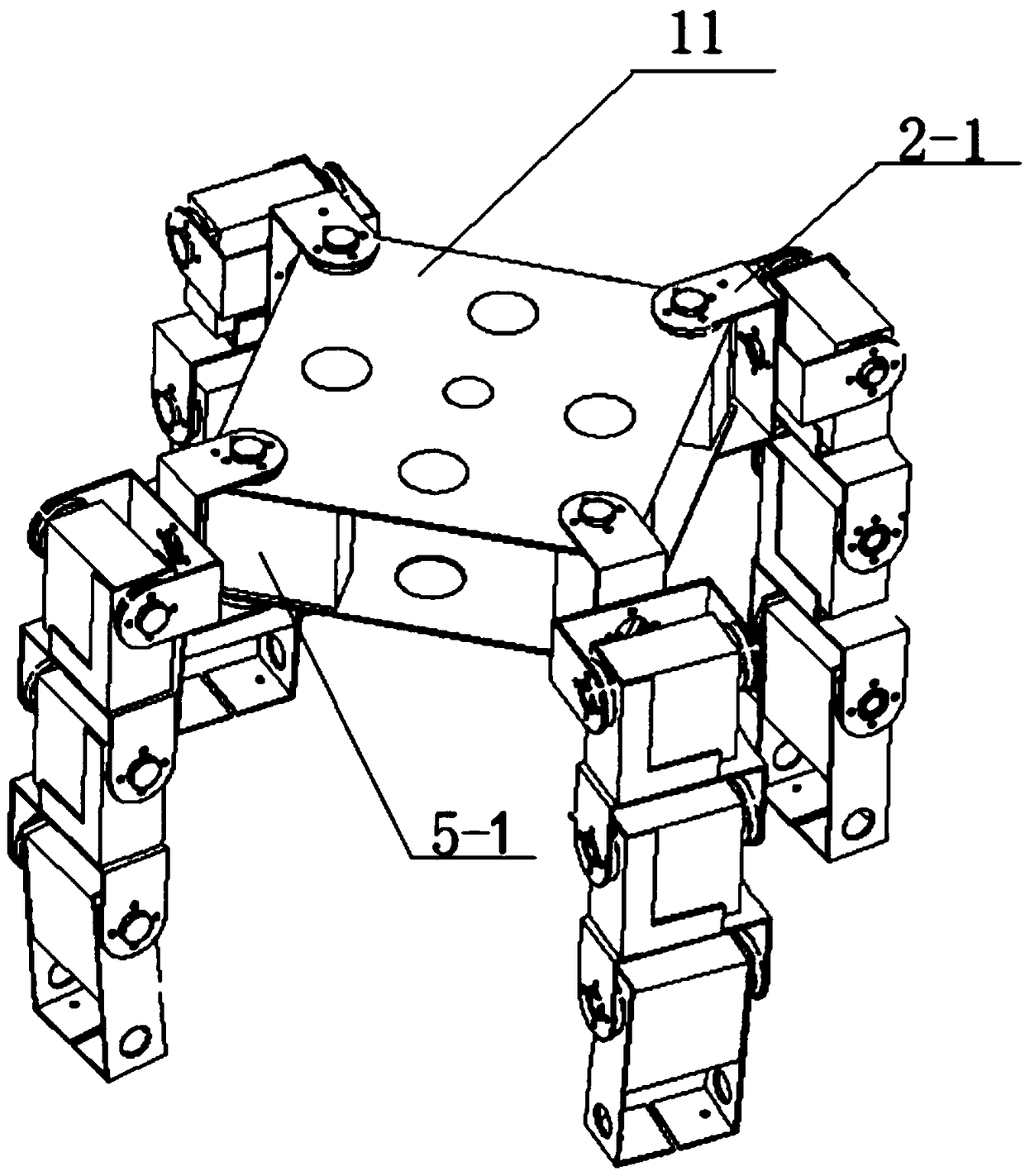
[0025] see figure 1 , figure 2 , image 3 and Figure 4 , the main body 11 of the robot based on the mechanical legs that can drill the wall is rectangular, and the main body 11 is provided with four mechanical legs, and the four mechanical legs are respectively arranged on the four corners of the main body 11, and the mechanical swing device on each mechanical leg has three;
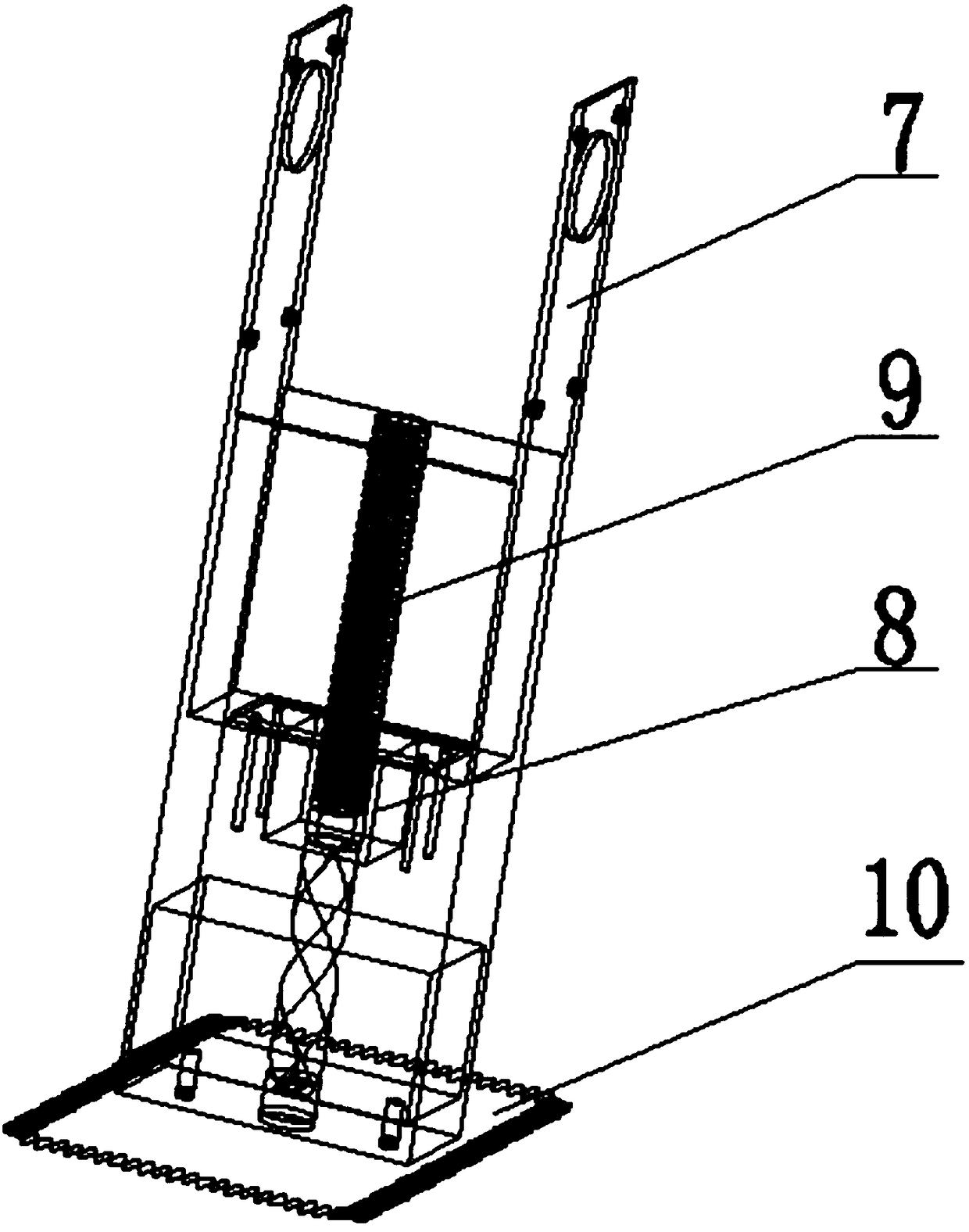
[0026] Each mechanical leg includes a first U-shaped connector fixed on the body 11, the first U-shaped connector fixes the servo motor 4 through the U-shaped structural member 3, and the servo motor 4 is connected to the second U-shaped connector 2 that can rotate -2, the second U-shaped connector 2-2 is provided with a steering wheel, the second steering gear 5-2 can control the rotation of the second U-shaped connector 2-2 through the steering wheel, and the second steering gear 5-2 passes through the first An L-shaped structural member 6-1 is fixed on the third U-shaped connector 2-3, and a ste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com