

Six-degree-of-freedom control handle
A technology for controlling handles and degrees of freedom, applied in manipulators, manufacturing tools, etc., can solve problems that affect the operation of manipulators, limit the use of occasions, use complex control handles, etc., and achieve the effects of flexible and reliable control, simple appearance, and convenient operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments, wherein the specific embodiments and descriptions are only used to explain the present invention, but are not intended to limit the present invention.
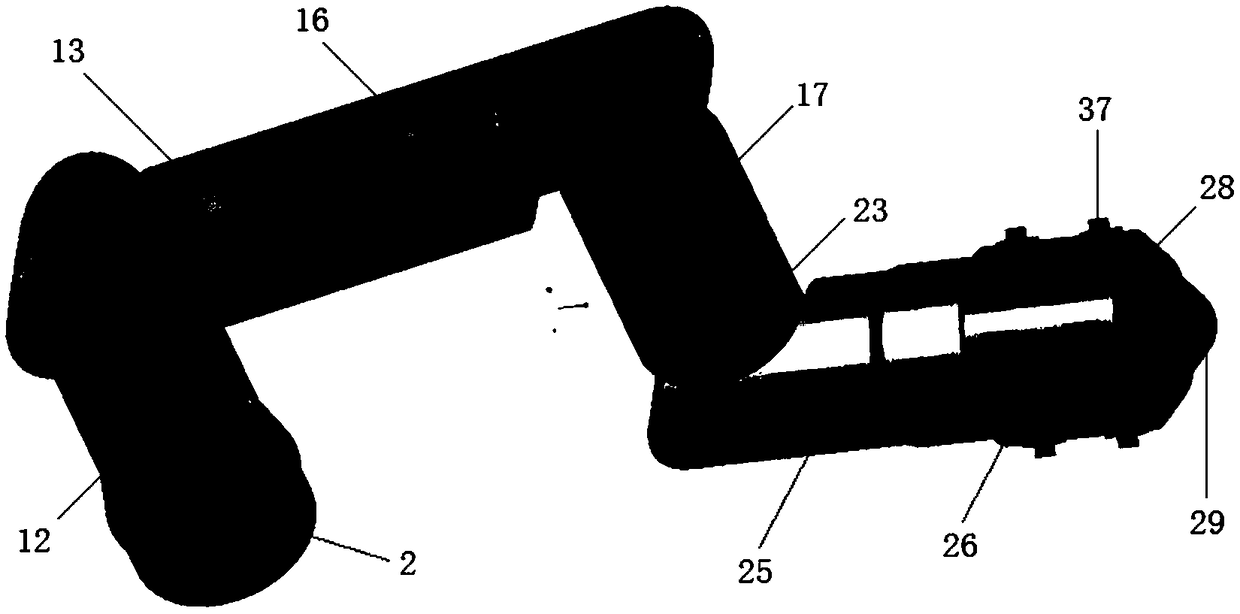
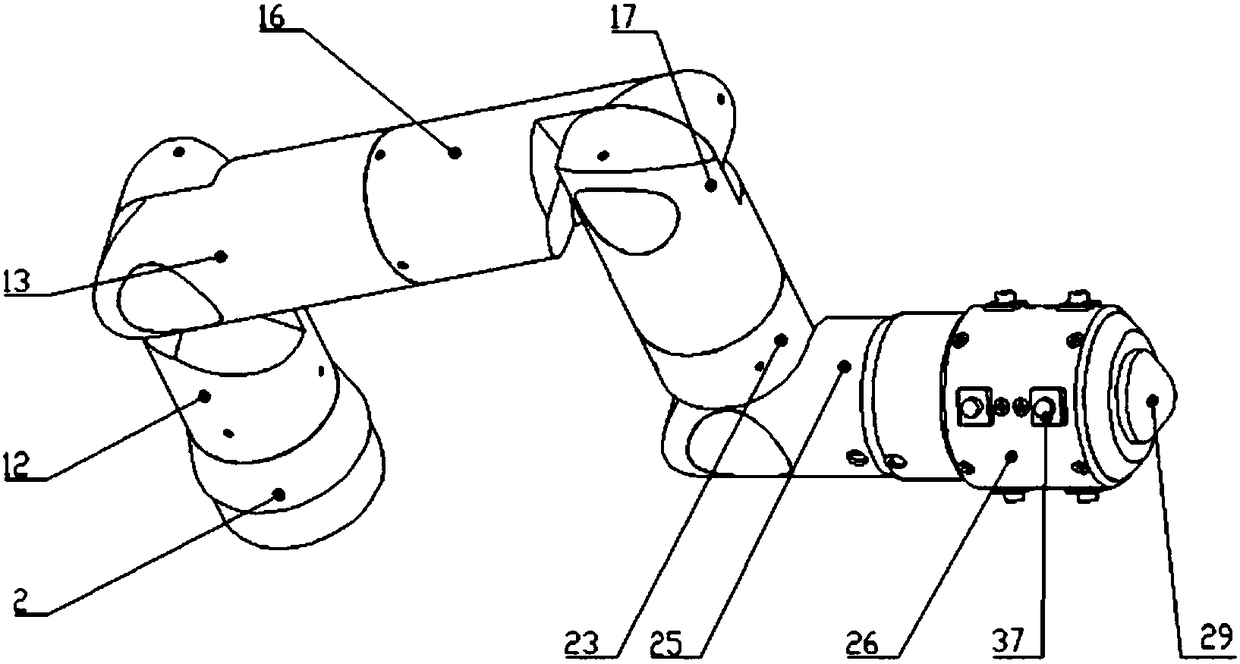
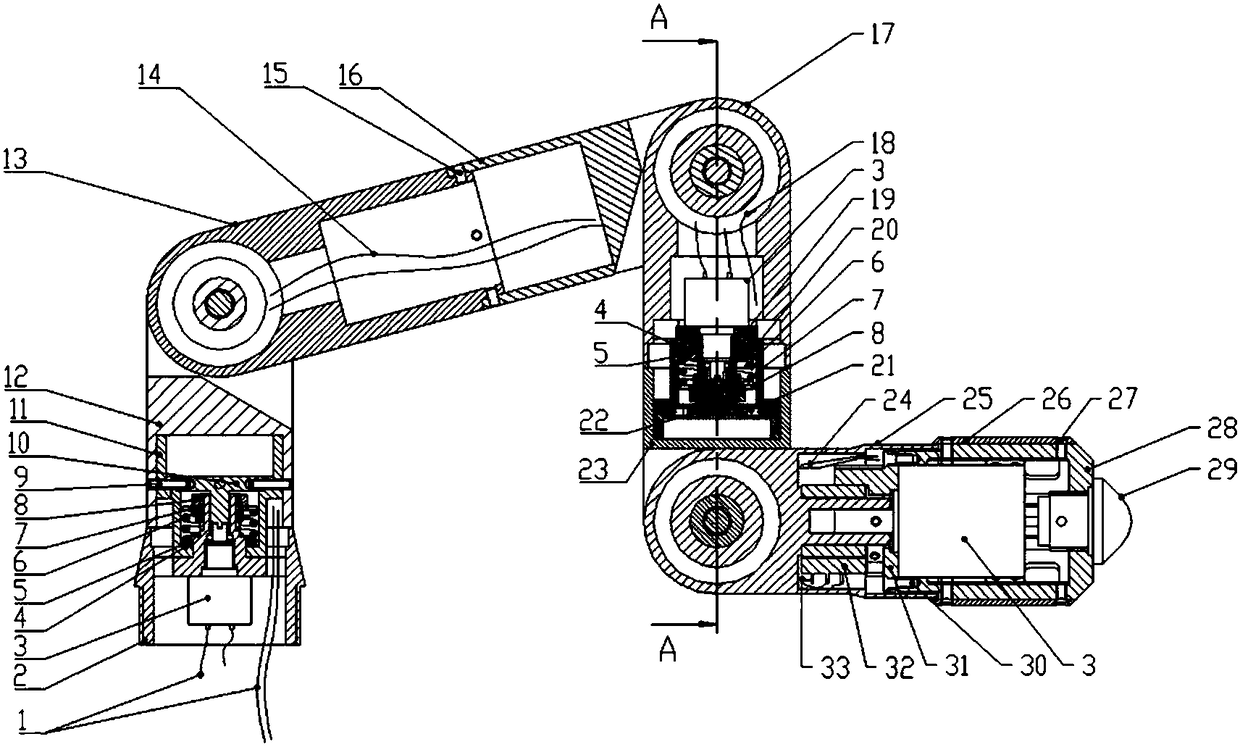
[0028] Such as Figure 1 ~ Figure 3As shown, the present invention discloses a 6-DOF control handle, including a base 2, a shoulder joint 12, a large arm joint 13 and 16, a small arm joint 17, an elbow joint 23, a wrist joint 25, a claw 28 and a sensor 3 ; The base 2, the shoulder joint 12, the upper arm joint 13 and 16, the forearm joint 17, the elbow joint 23, the wrist joint 25 are connected to each other by the rotation shaft in turn, and they are connected by the rotation shaft between the two. Perform swinging motion; the sensor 3 is embedded on the above-mentioned rotating shaft to collect the angle signals of these swinging motions; the wrist joint 25 and the claw 28 are connected by a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More