

Indoor and independent drone navigation method based on three-dimensional vision SLAM
A three-dimensional vision, autonomous navigation technology, applied in navigation, mapping and navigation, navigation calculation tools, etc., can solve the problems of unrecognized features, inaccurate pose estimation, feature loss, etc., to solve the problems of complexity and robustness , to avoid the effect of inability to locate and estimate the pose and pose accurately
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The following description and drawings illustrate specific embodiments of the invention sufficiently to enable those skilled in the art to practice them. Other embodiments may incorporate structural, logical, electrical, process, and other changes. The examples merely represent possible variations. Individual components and functions are optional unless explicitly required, and the order of operations may vary. Portions and features of some embodiments may be included in or substituted for those of other embodiments. The scope of embodiments of the present invention includes the full scope of the claims, and all available equivalents of the claims.
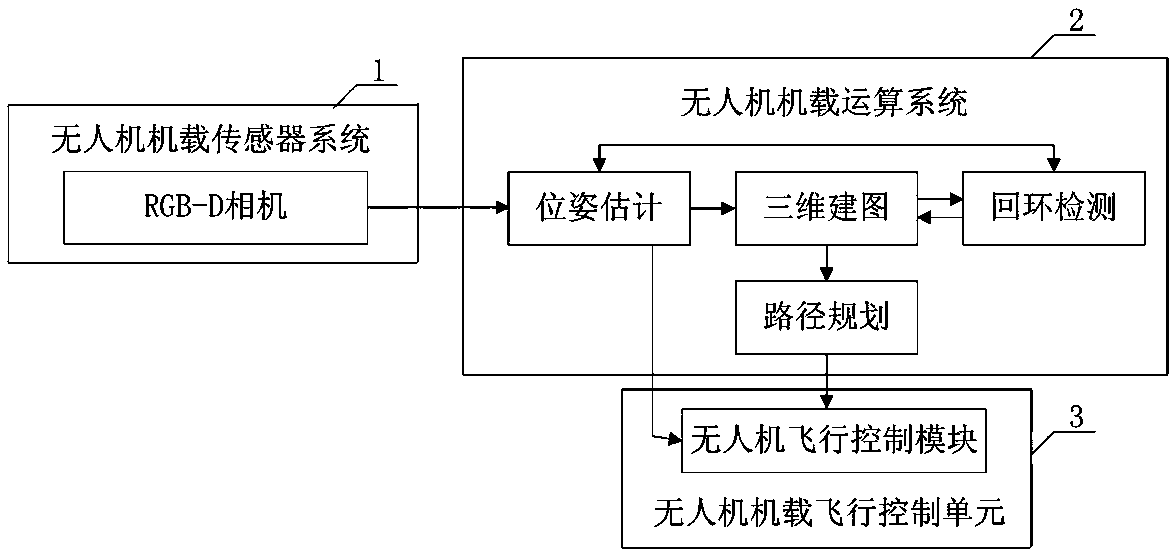
[0025] Such as figure 2 As shown, the SLAM system includes: UAV onboard sensor system 1 , UAV onboard computing system 2 and UAV onboard flight control unit 3 .
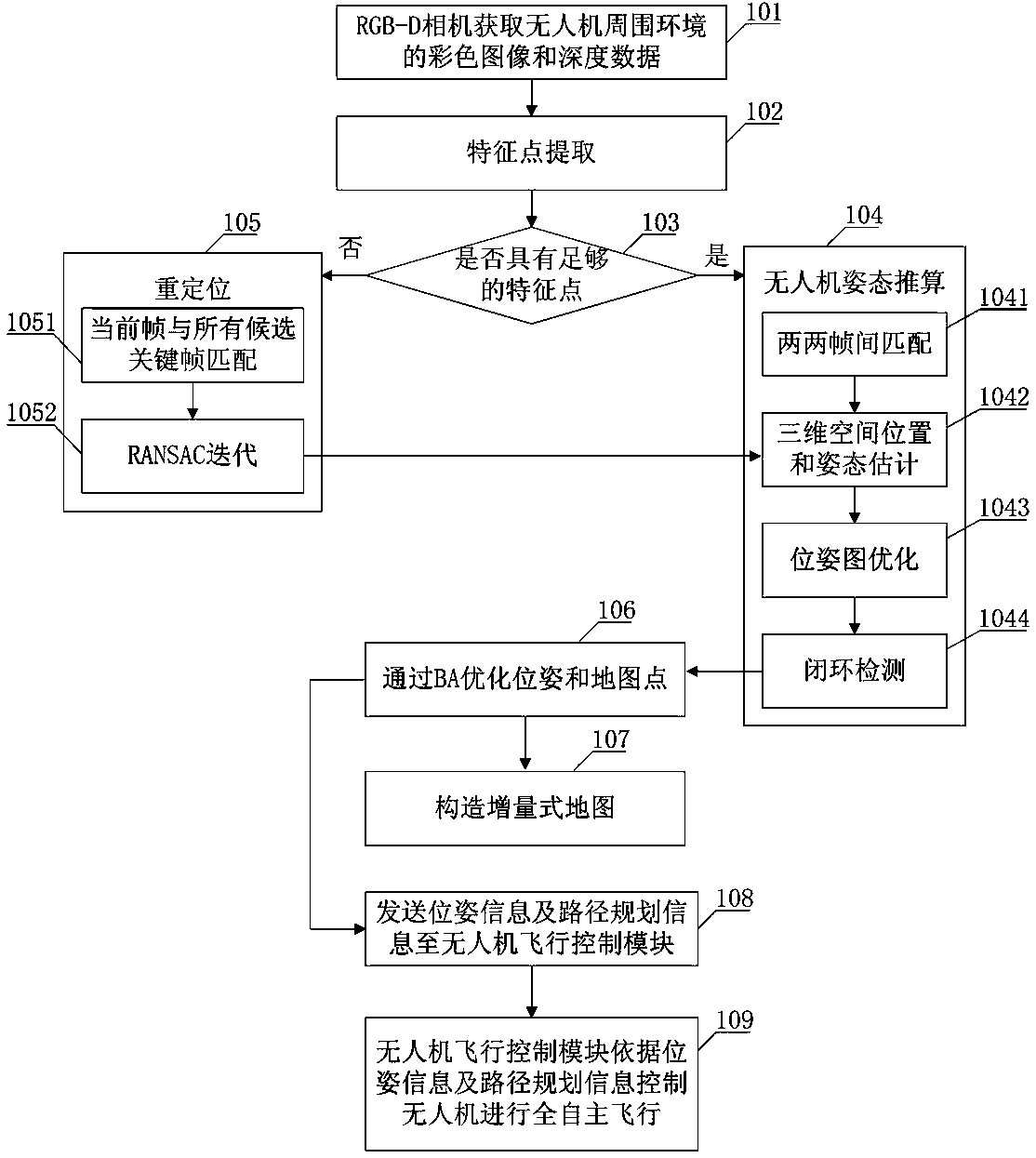
[0026] The RGB-D camera of the drone's onboard sensor system 1 is used to acquire color images and depth data of the drone's surrounding environment. The UA...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More