

Linear quadratic regulator control method of multi-agent system
A multi-agent system, linear quadratic technology, applied in the directions of adaptive control, general control system, control/regulation system, etc., can solve the problem of difficult implementation of the controller, and achieve the elimination of diagonal structure constraints, easy and intuitive operation Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045]The present invention will be described in detail below according to the accompanying drawings and preferred embodiments, and the purpose and effect of the present invention will become clearer. The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
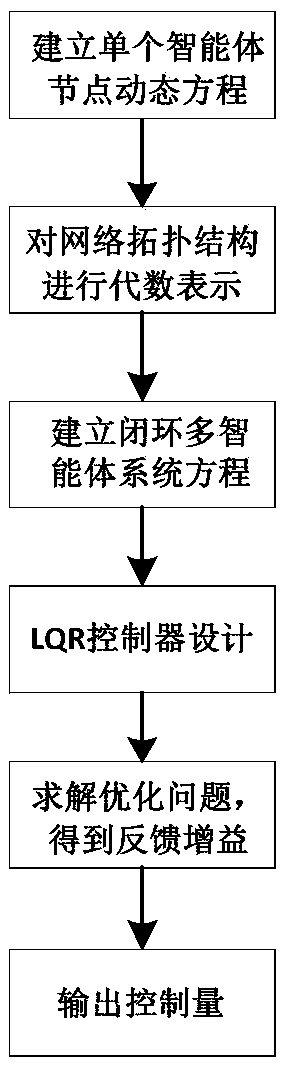
[0046] Step 1: Establish the dynamic characteristic equation of a single agent node:
[0047]
[0048] where x i (t), y i (t) are the state and output of the i-th node respectively, u i (t) is the control input of the i-th node, A is the system matrix of the dynamic characteristic equation, B is the input matrix of the dynamic characteristic equation, C is the output matrix of the dynamic characteristic equation, D is the direct transfer matrix;
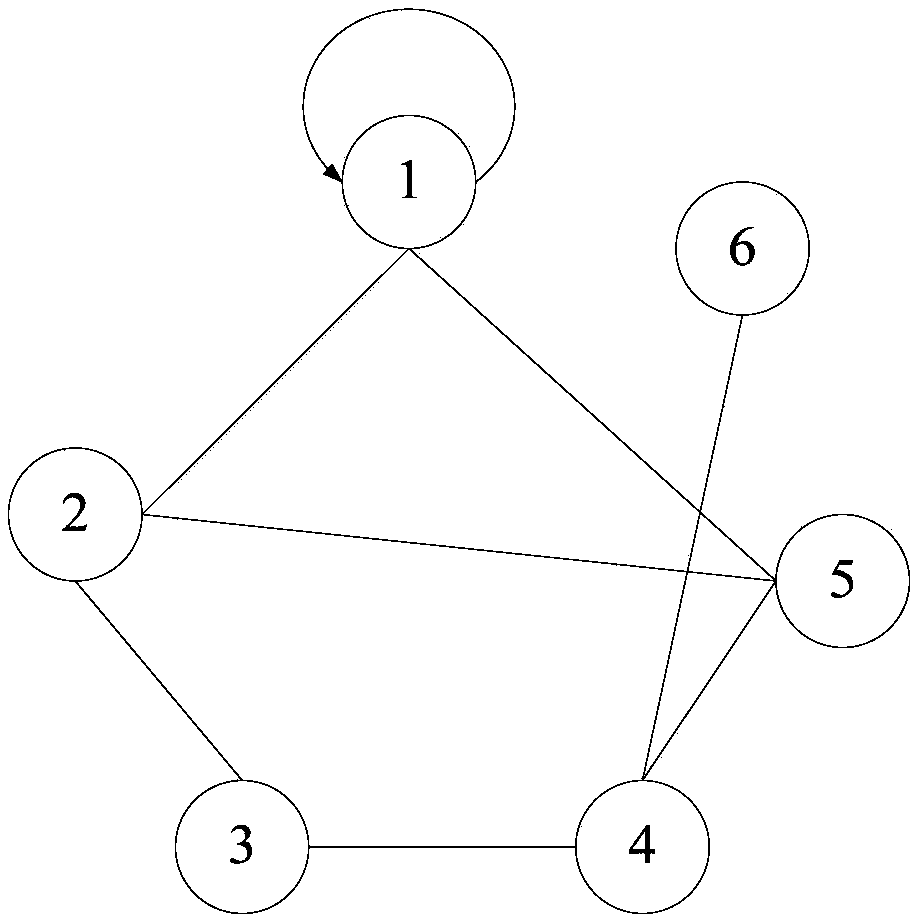
[0049] Step 2: Algebraically represent the networ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More