

Uncoupling control method for double-inputting and double-outputting system
A dual-input dual-output, decoupling control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as inapplicability, no discussion of the controlled object, and complex form of the controlled object
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0059] Implement the design and tuning method of the decoupling controller provided by the present invention for a widely used chemical hydrocarbon fractionation tower process, and introduce the specific implementation steps:
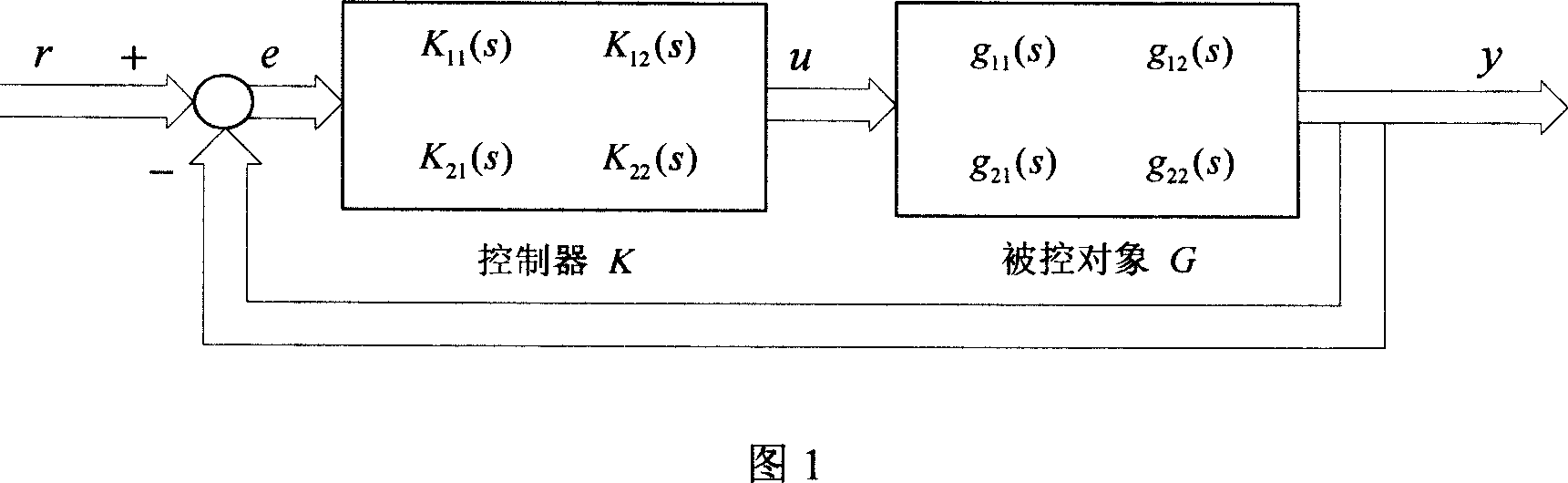
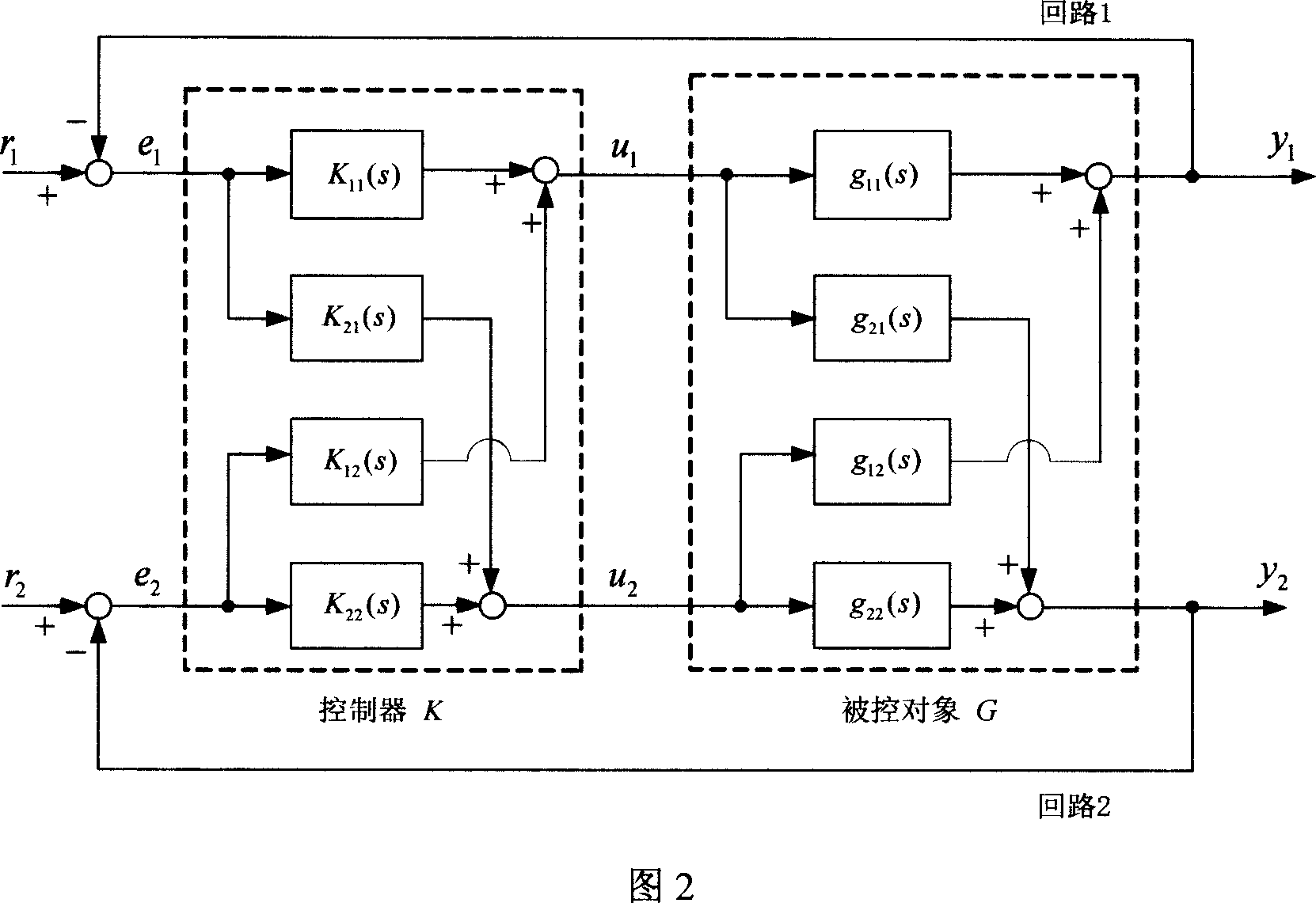
[0060] The present embodiment adopts the unit feedback control structure, and the decomposition structure of this closed-loop control system is shown in Figure 2, and the specific steps of the control method are as follows:
[0061] 1. First, the identification module in the industrial control system identifies the model parameters of the controlled object according to commonly used identification methods such as the step response method, and obtains the transfer function matrix of the controlled object:
[0062] G ( s ) = 12.8 e - ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More