

Design method of lower computer of redundancy mechanical arm of flying operation robot
A work robot, bit controller technology, applied in the direction of manipulators, program control manipulators, manufacturing tools, etc., can solve the problem of time-consuming data
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
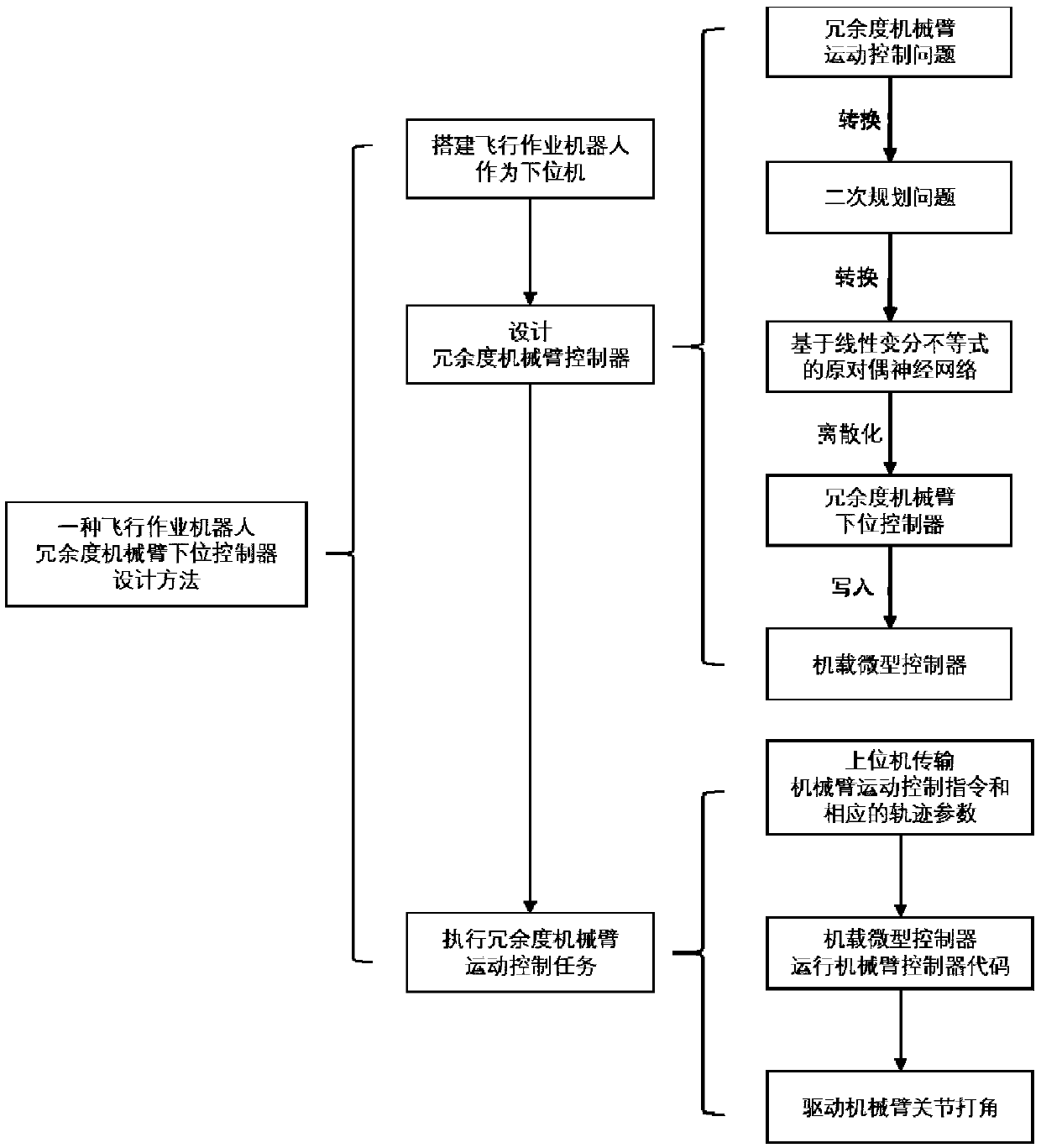
[0061] Such as figure 1 Shown is the concrete design flowchart of the present invention. A method for designing a lower controller of a redundant mechanical arm of a flying operation robot, the specific steps comprising:
[0062] (1) Build a flying operation robot as the lower computer;
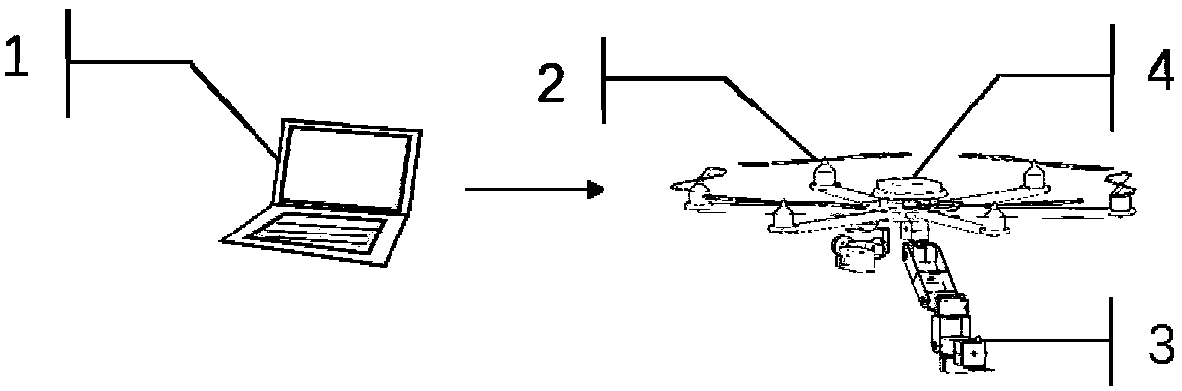
[0063] Such as figure 2 Shown is the system block diagram of the present invention. The system is composed of a PC-side upper computer 1 and a flight operation robot lower computer.
[0064] Specifically, the lower computer of the flight operation robot is mainly composed of a multi-rotor aircraft 2 and a redundant mechanical arm 3 .
[0065] The control circuit 4 carried by the lower computer includes a micro-controller, a wireless communication module, and a drive circuit, and the on-board micro-controller runs the redundant manipulator motion planning controller designed according to the present invention.
[0066] (2) According to the flying operation robot designed in step (1), acc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More