

Road surface and obstacle detection method based on forward two-dimensional laser radar mobile scanning
A lidar, mobile scanning technology, applied in the field of environmental perception, can solve problems such as high price
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0080] The specific implementation manner of the present invention will be described below in conjunction with the accompanying drawings and embodiments.
[0081] The present invention comprises the following steps:
[0082] 1) Coordinate system definition and coordinate conversion:
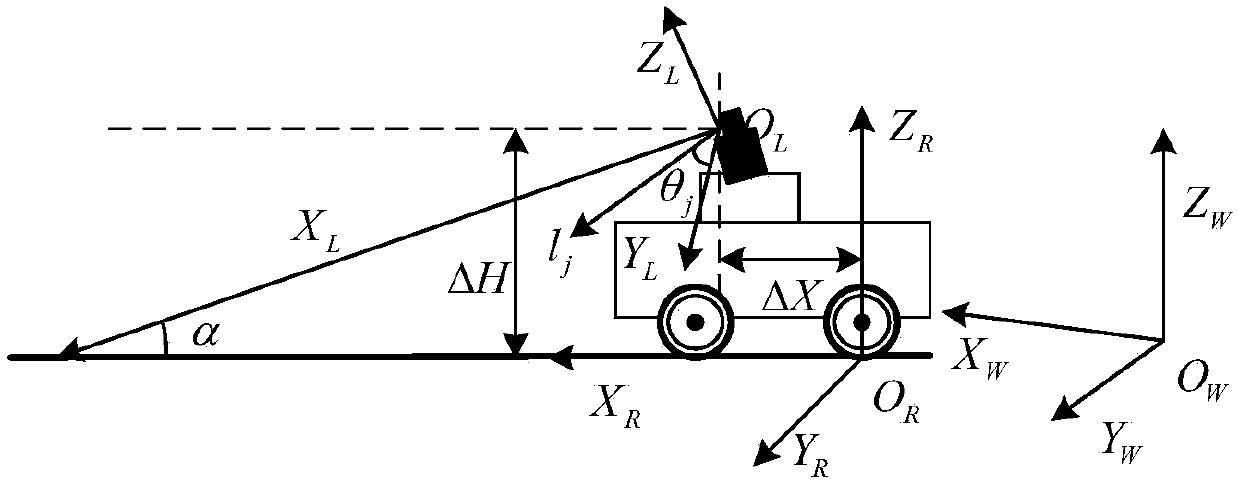
[0083] Install the 2D laser radar scanning rangefinder directly in front of the mobile robot, the angle of inclination to the ground is α, and define the coordinate system of the laser radar as F L (O L ,θ,l,X L ,Y L ), O L is the laser source point, (θ, l) is the polar coordinates of the scanning point, θ is the scanning angle, l is the scanning distance, (X L ,Y L ) is the Cartesian coordinate of the scanning point in this coordinate system, and the starting angle of scanning θ min = θ 1 , end angle θ max = θ N , scan angle θ j , scan distance l j , angular resolution Δθ=θ j -θ j-1 ; The coordinate system of the robot is defined as F R (O R ,X R ,Y R ,Z R ), O R is the conta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More