

Brake exchange mechanism for intelligent climbing robot
An exchange mechanism and robot technology, applied in the field of robots, can solve the problems of control accuracy and reliability, high production and maintenance costs, poor stability of braking force output, etc., and achieves low operating energy consumption, simple structure, and braking force output. stable effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
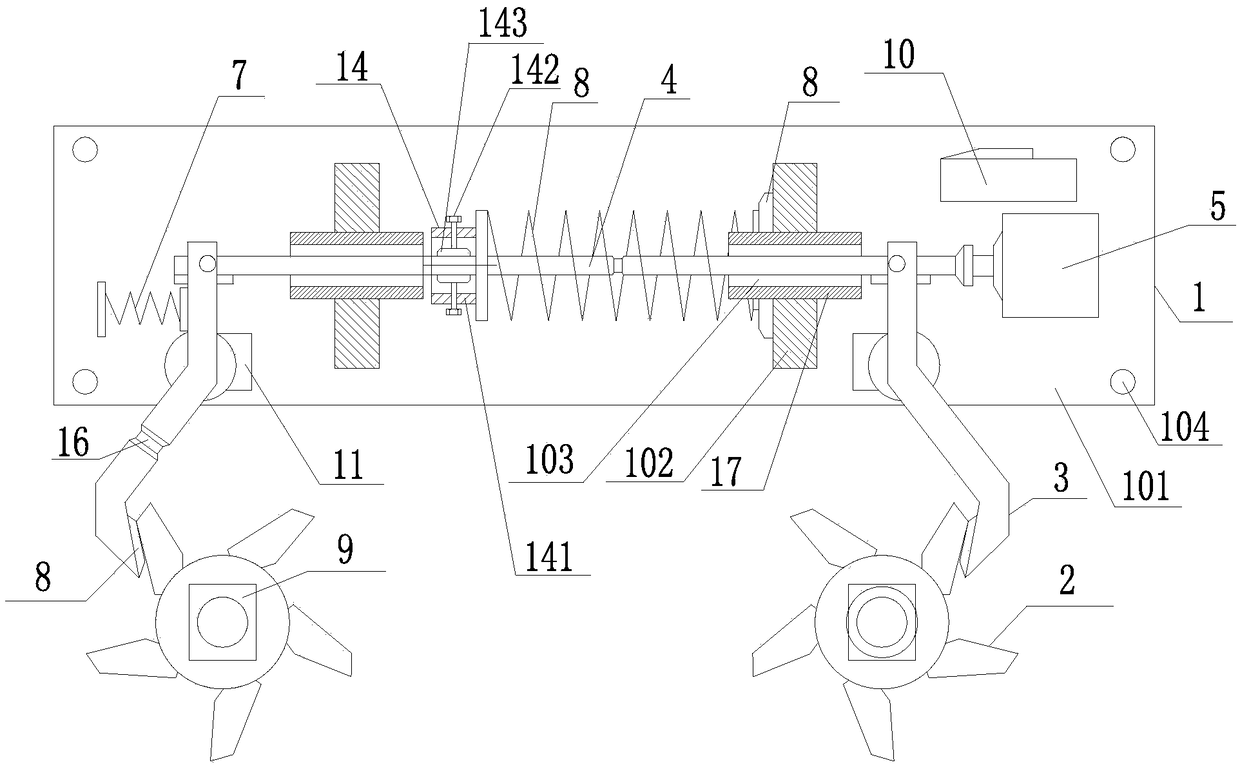
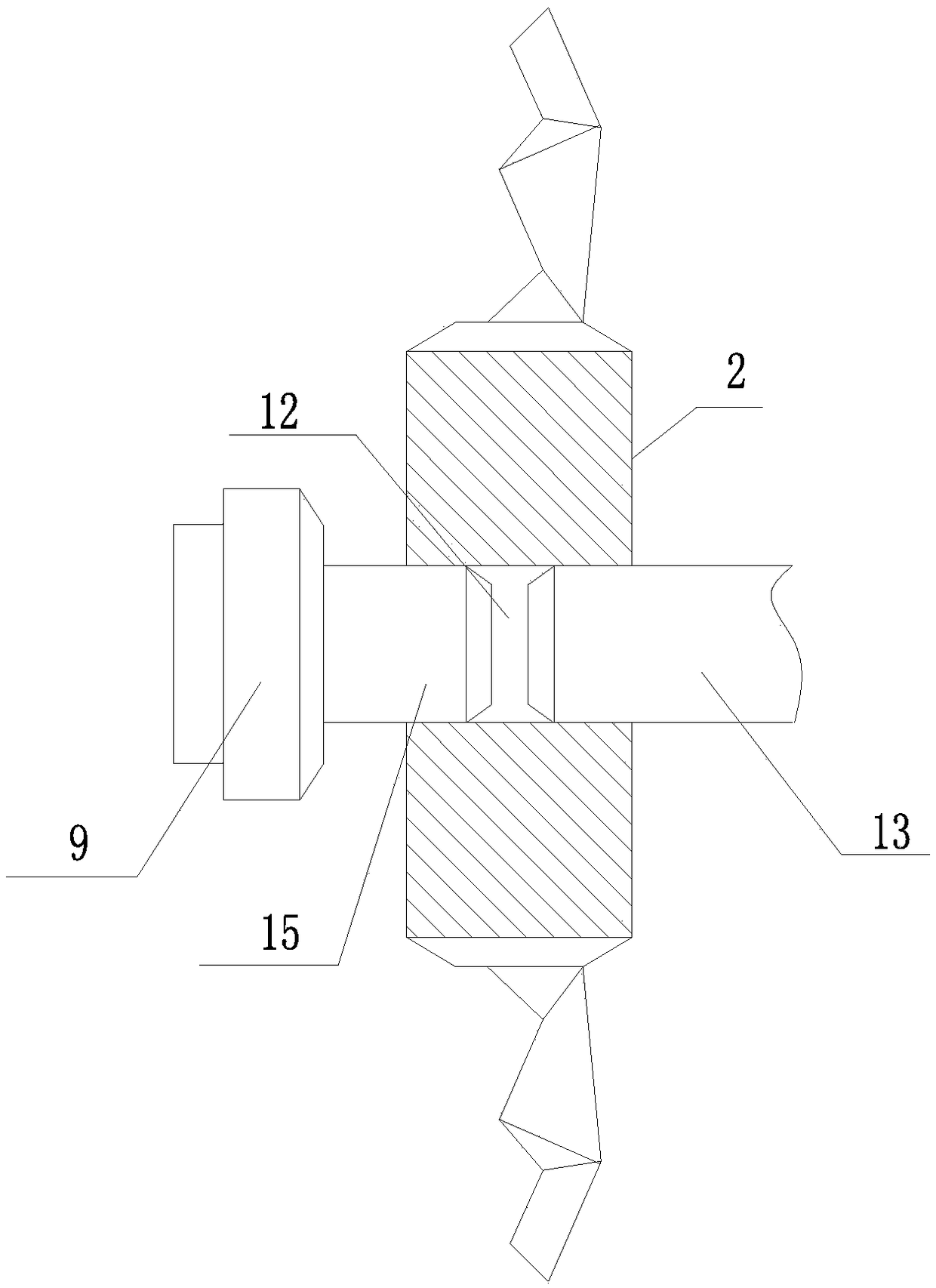
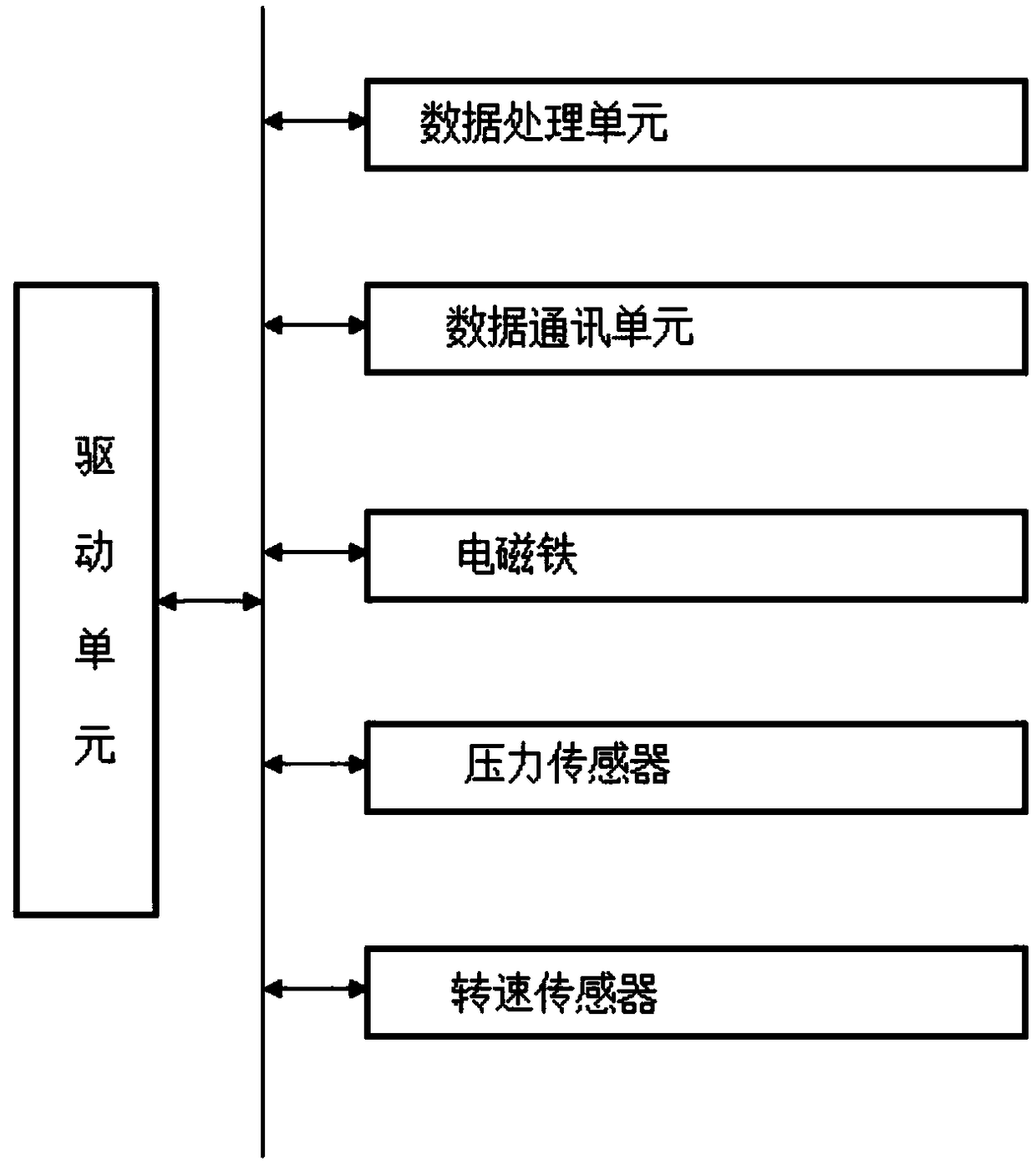
[0022] Such as figure 1 A brake exchange mechanism for an intelligent climbing robot described in —3, comprising a load frame 1, a ratchet 2, a pawl 3, a push-pull rod 4, an electromagnet 5, a pressure spring 6, a return spring 7, a pressure sensor 8. The rotational speed sensor 9 and the control system 10, wherein the carrying frame 1 includes a bottom plate 101 and a support plate 102, at least two support plates 102 are installed on the upper end surface of the bottom plate 101 and are vertically distributed with the upper end surface of the bottom plate 101, and on each support plate 102 Through-holes 103 are provided and coaxially distributed, and the push-pull rod 4 is slidingly connected with the support plate 102 through the through-hole 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More