

Underwater bionic robotic fish driven by fluid conveying pipe
A technology of robotic fish and flow tubes, which is applied in underwater operation equipment, transportation and packaging, and emission reduction based on propulsion, can solve problems such as impacting the vicinity, large environmental disturbances, and robots being trapped underwater, and achieve a better life Status and habits, low overall energy consumption, and the effect of reducing the risk of being trapped
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not constitute a conflict with each other.
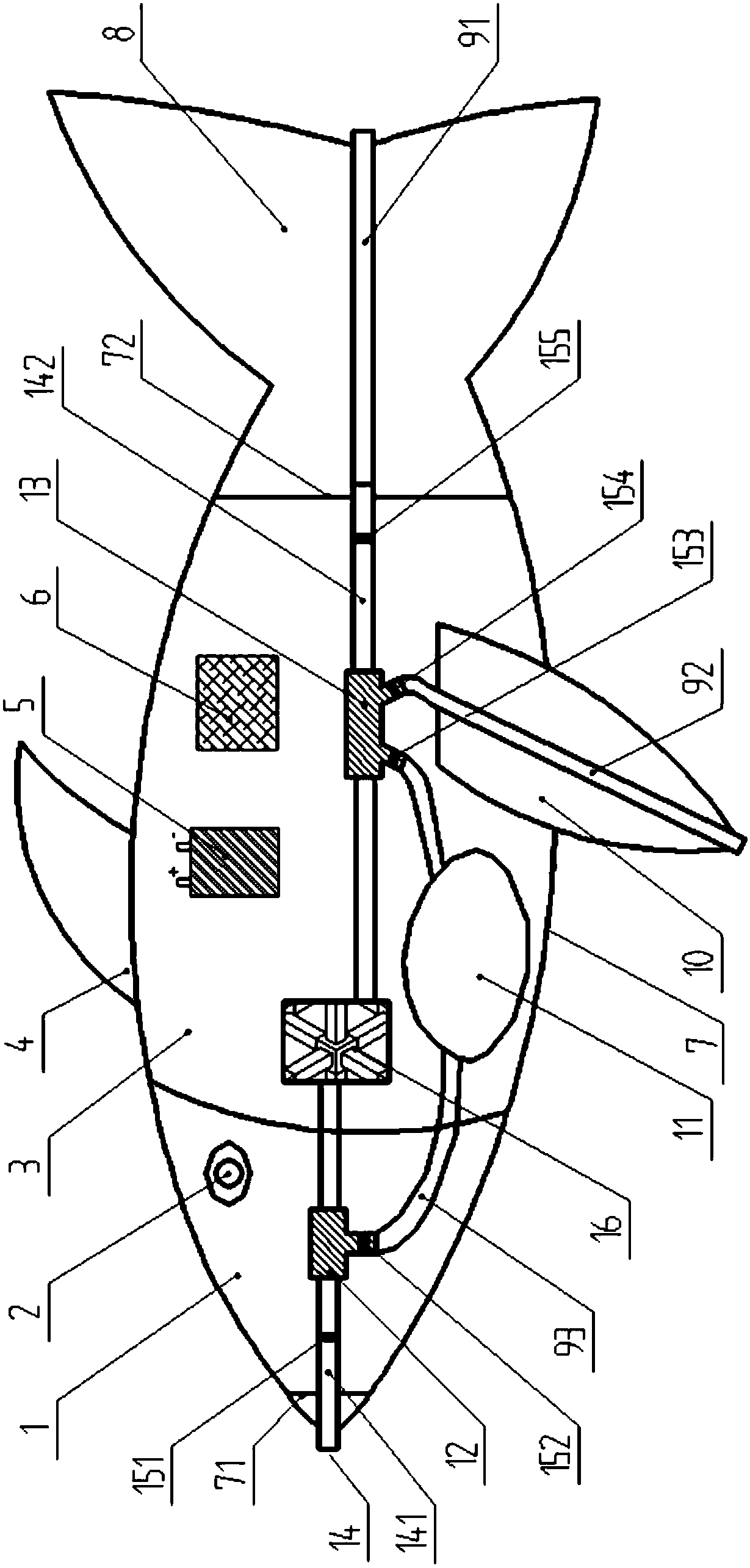
[0029] Such as figure 1 As shown, the underwater bionic robotic fish of the present invention includes: fish head 1, fisheye camera 2, fish body 3, dorsal fin 4, power supply 5 (this embodiment is a lithium battery), controller 6, sealed cavity 7, the first First seal ring 71, second seal ring 72, tail fin 8, tail fin flow hose 91, pectoral fin flow hose 92, water bag flow hose 93, pectoral fin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More