

Multi-line laser radar ground point separation method, device, vehicle
A multi-line laser and radar ground technology, used in measurement devices, image analysis, radio wave measurement systems, etc., can solve the problems of inaccurate separation of obstacle point clouds and ground point clouds, low real-time performance, and long time consumption.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In the drawings, the same or similar reference signs are used to indicate the same or similar elements or elements with the same or similar functions. The embodiments of the present invention will be described in detail below in conjunction with the drawings.
[0022] The multi-line lidar ground point separation method provided in this embodiment includes the following steps:
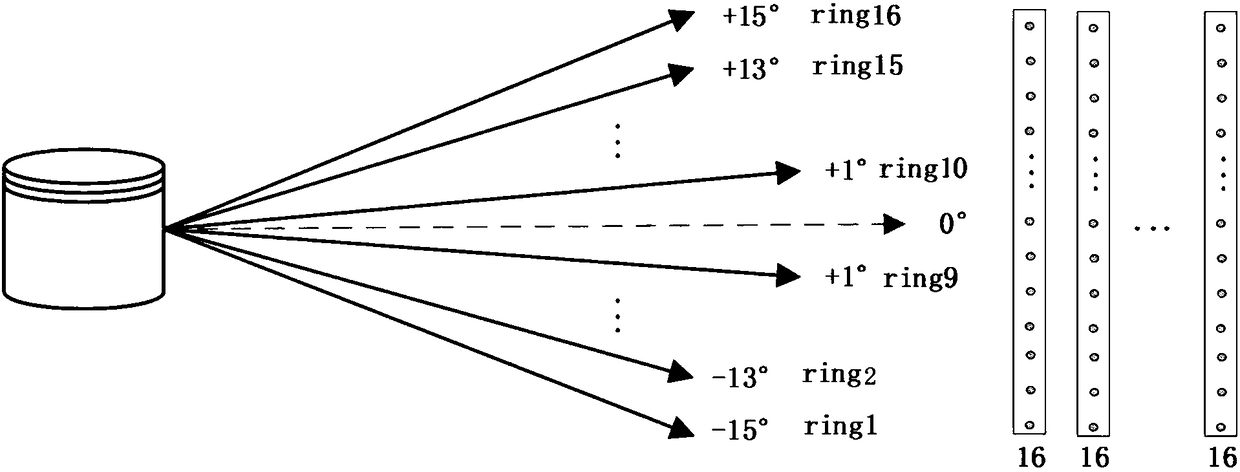
[0023] Step 100: Scan the detection area in a horizontally rotating manner through the laser lines emitted by the multi-line lidar to obtain point cloud data collected by the multi-line lidar. The following describes the implementation method of this step through 16-line lidar.
[0024] Such as figure 1 As shown, the straight line with arrows in the figure shows the laser line emitted by the 16-line lidar. In the lidar coordinate system, each laser head emits and undergoes internal coordinate conversion to the same origin coordinate system, that is, the lidar coordinate system. The horizontal plane i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More