

Method for estimating visual gestureattitudes of moving target for underwater vehicle
An underwater vehicle and pose estimation technology, applied in the field of visual pose estimation of moving targets, can solve problems such as multiple solutions, poor robustness, inability to obtain the speed of the target, and limited range of use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] Embodiments of the present invention are described in detail below, and the embodiments are exemplary and intended to explain the present invention, but should not be construed as limiting the present invention.
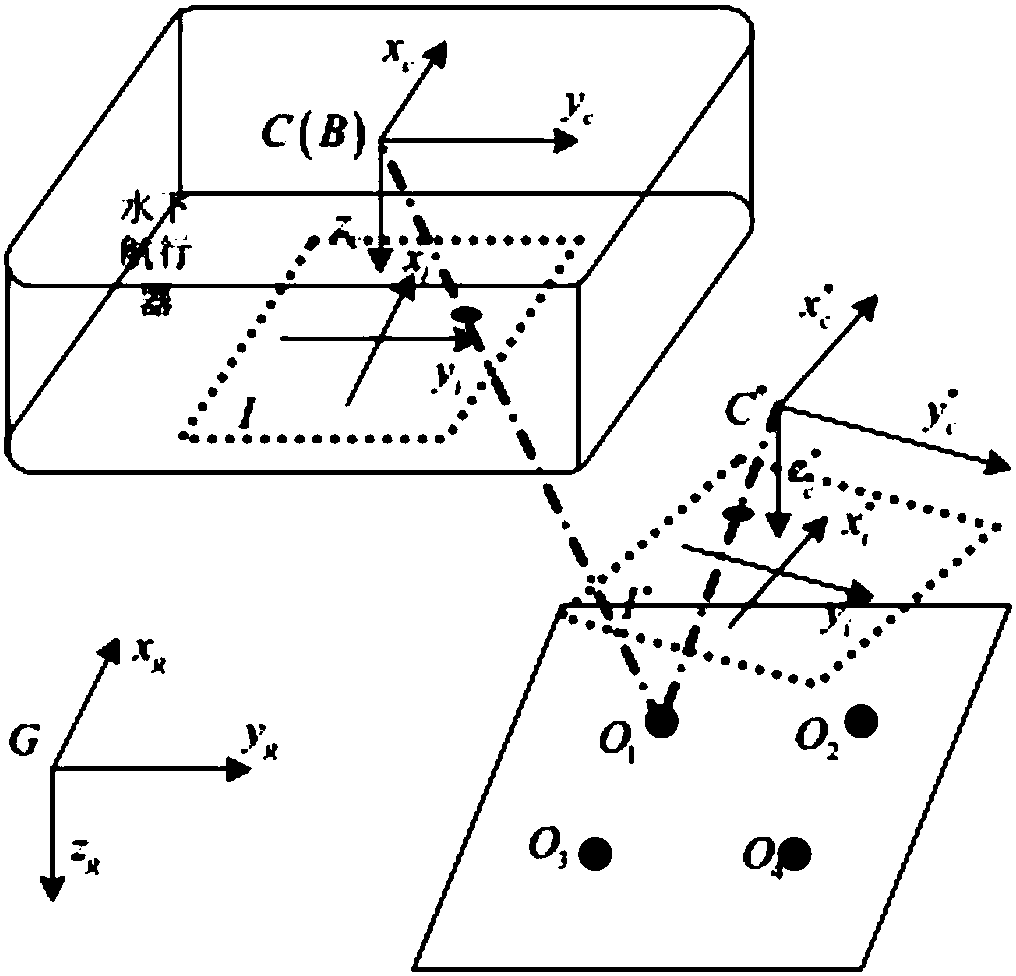
[0065] This embodiment is based on the nonlinear unscented Kalman filter (Unscented Kalmen Filter UKF). The hardware basis of the method is that an industrial camera is installed in the middle of the bottom of the six-degree-of-freedom underwater vehicle and looks down. The camera uses a sealed cabin to seal and waterproof, and the sealed cabin The lower end is plexiglass, and the frame rate of the camera reaches at least 20 frames. An industrial computer is installed in the main airtight compartment of the underwater vehicle. The processor performance of the industrial computer needs to reach i5 processor performance and above, and the hard disk memory needs to reach more than 32GB. The underwater vehicle is equipped with an azimuth and attitude measurement s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More