

Mechanical arm tail-end pose error correction method and system based on elliptic characteristics
A robotic arm and pose technology, which is applied in the field of pose error correction at the end of a robotic arm based on elliptical features, can solve problems such as the inability to achieve precise control of the angle deviation of the robotic arm joints, and achieve the goal of correcting control errors and improving operation accuracy. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The principles and features of the present invention will be described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
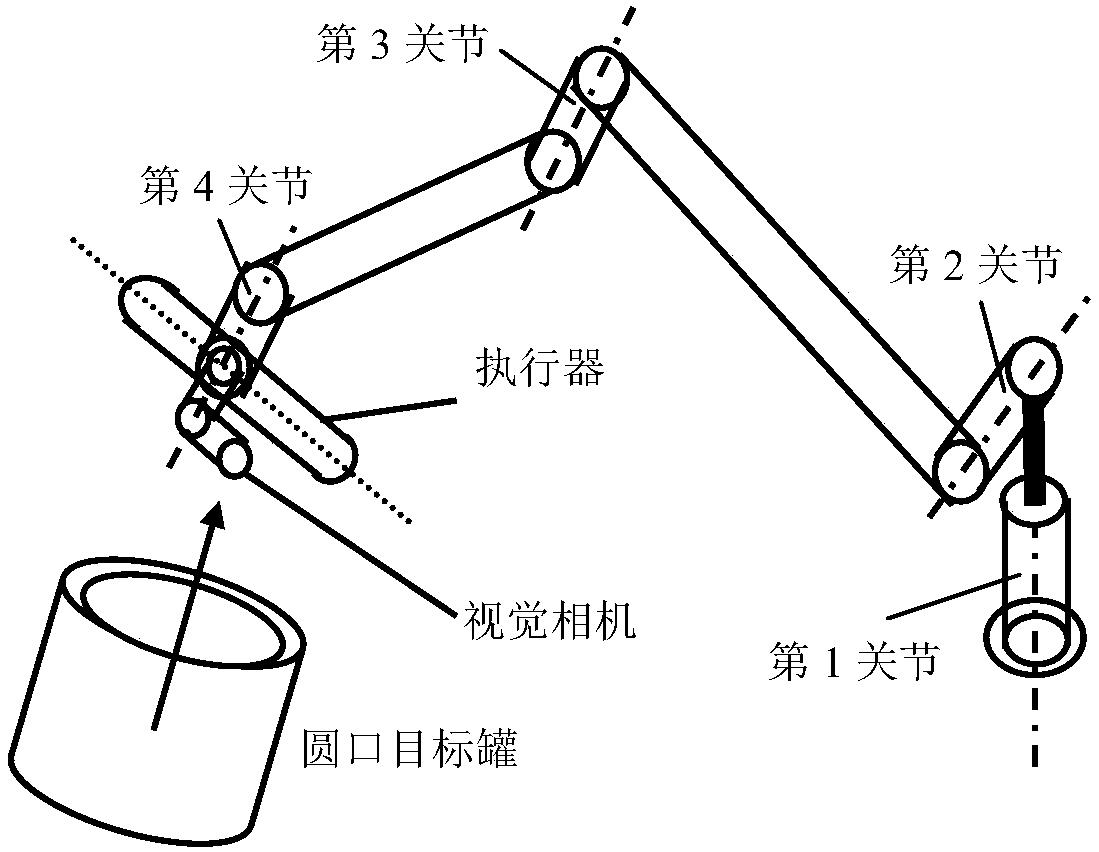
[0062] figure 1 Schematic diagram of the structure of the robotic arm, actuator, vision camera and target tank. The actuator is fixed at the end of the robotic arm, the visual camera is fixed on the actuator, and the target tank is fixed within the shooting range of the visual camera.
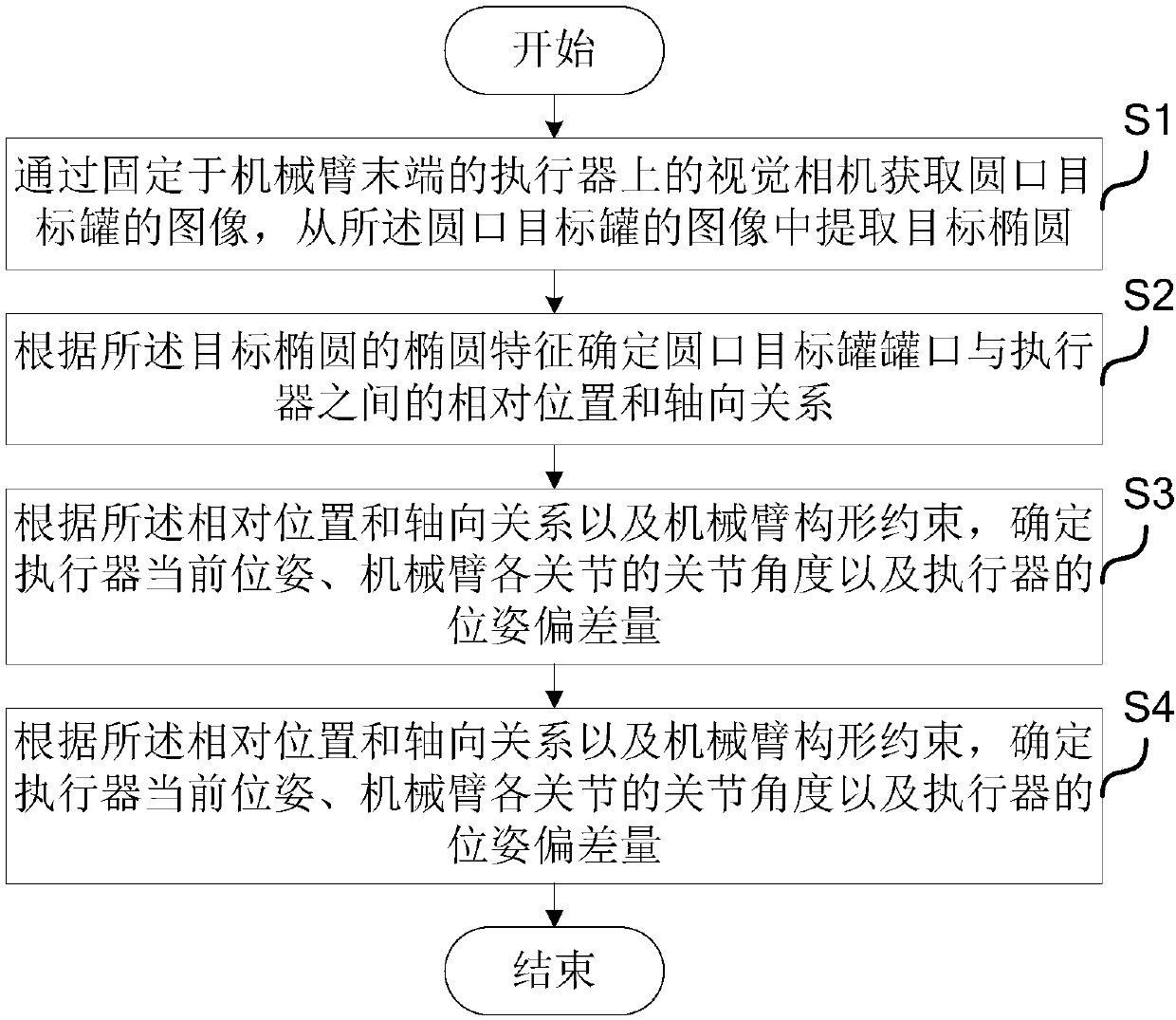
[0063] figure 2 A schematic flowchart of a method for correcting pose errors at the end of a manipulator based on ellipse features provided by an embodiment of the present invention is given. Such as figure 2 As shown, the method includes:
[0064] S1, acquiring an image of a round-mouthed target tank through a visual camera fixed on an actuator at the end of the mechanical arm, and extracting a target ellipse from the imag...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More