

An underactuated hand palm supporting multiple finger layouts
A finger and palm technology, applied in the field of underactuated hands and palms, can solve the problems of different degrees of flexibility of mechanical palms, and achieve the effect of simple and beautiful design, compact structure, and reducing the number of parts
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
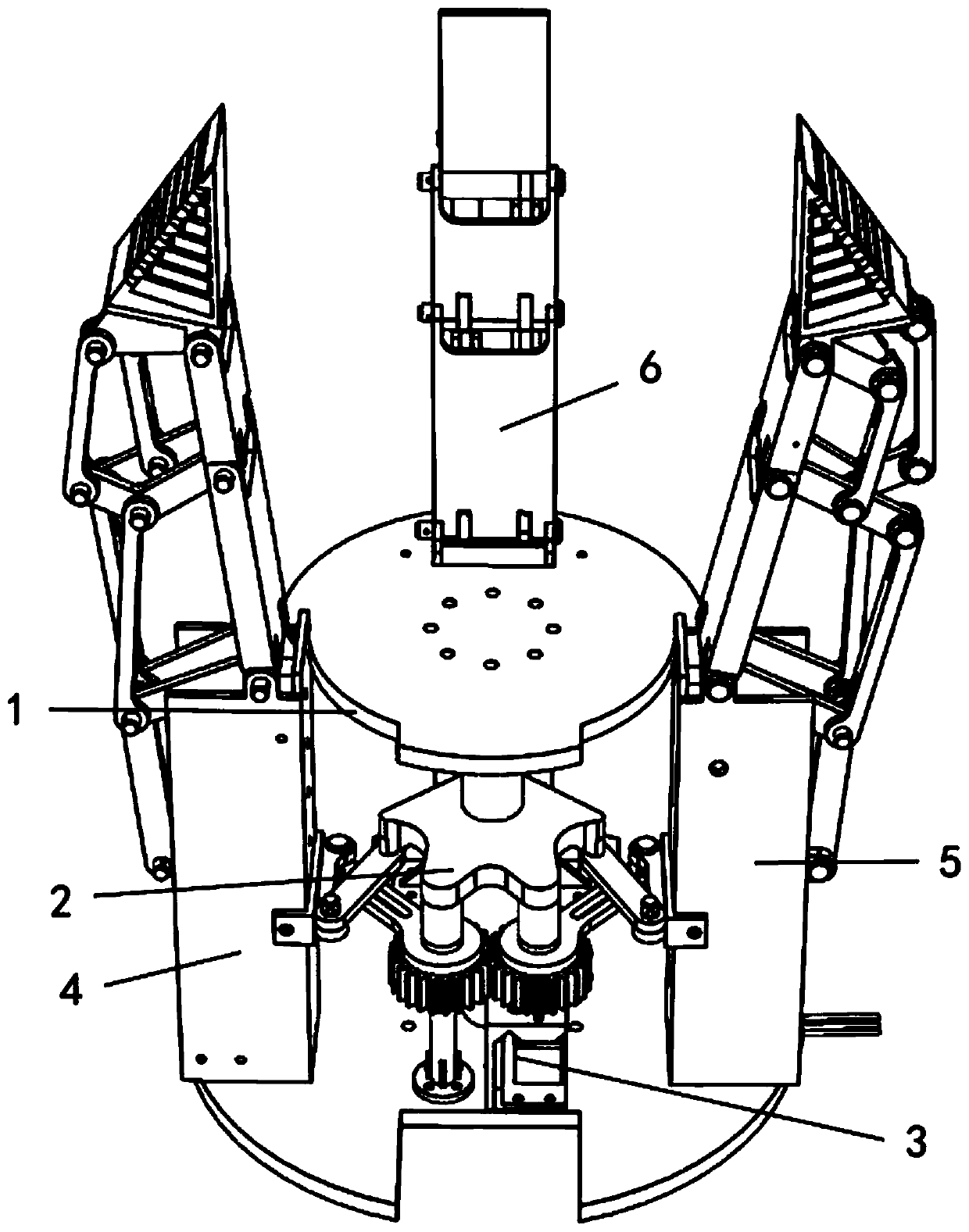
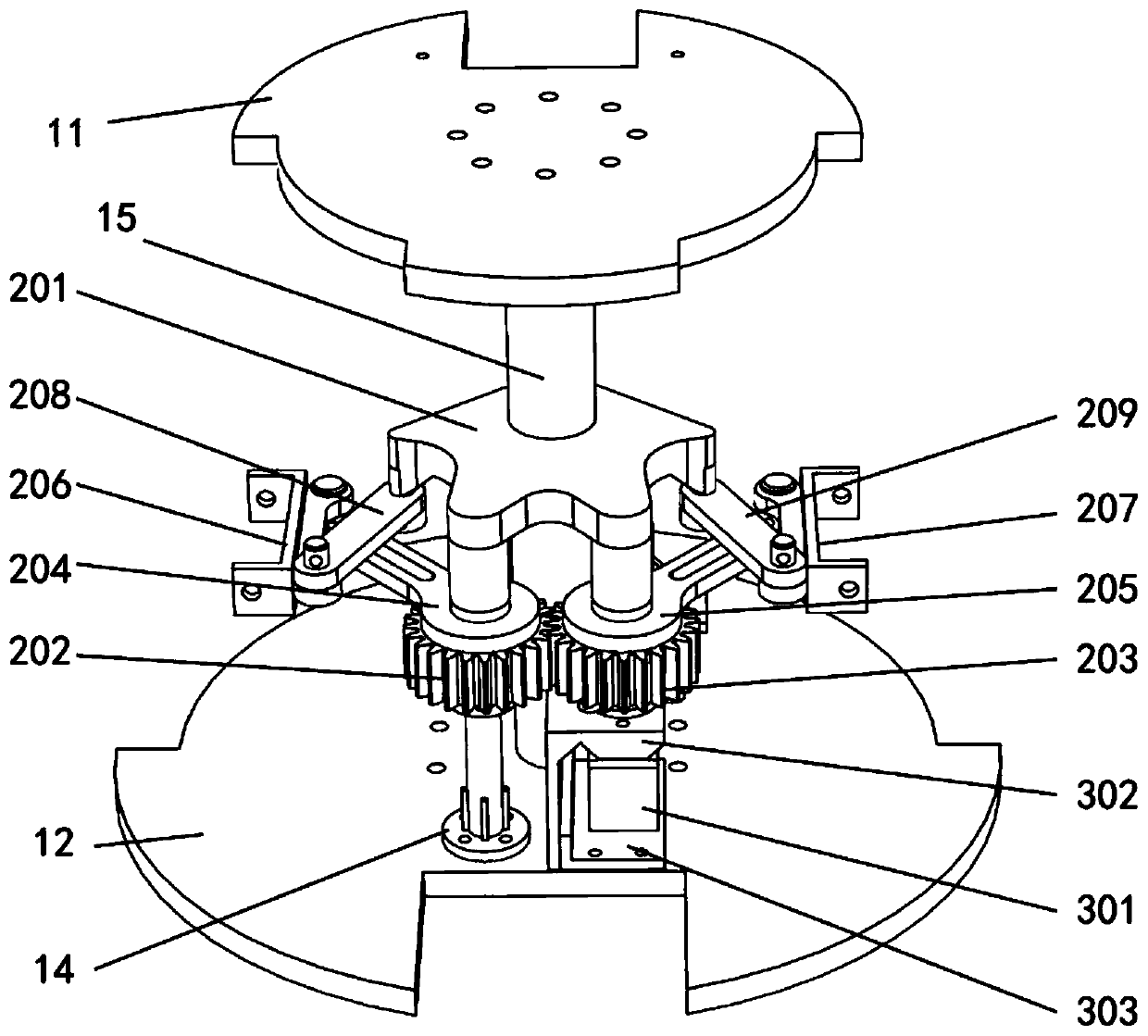
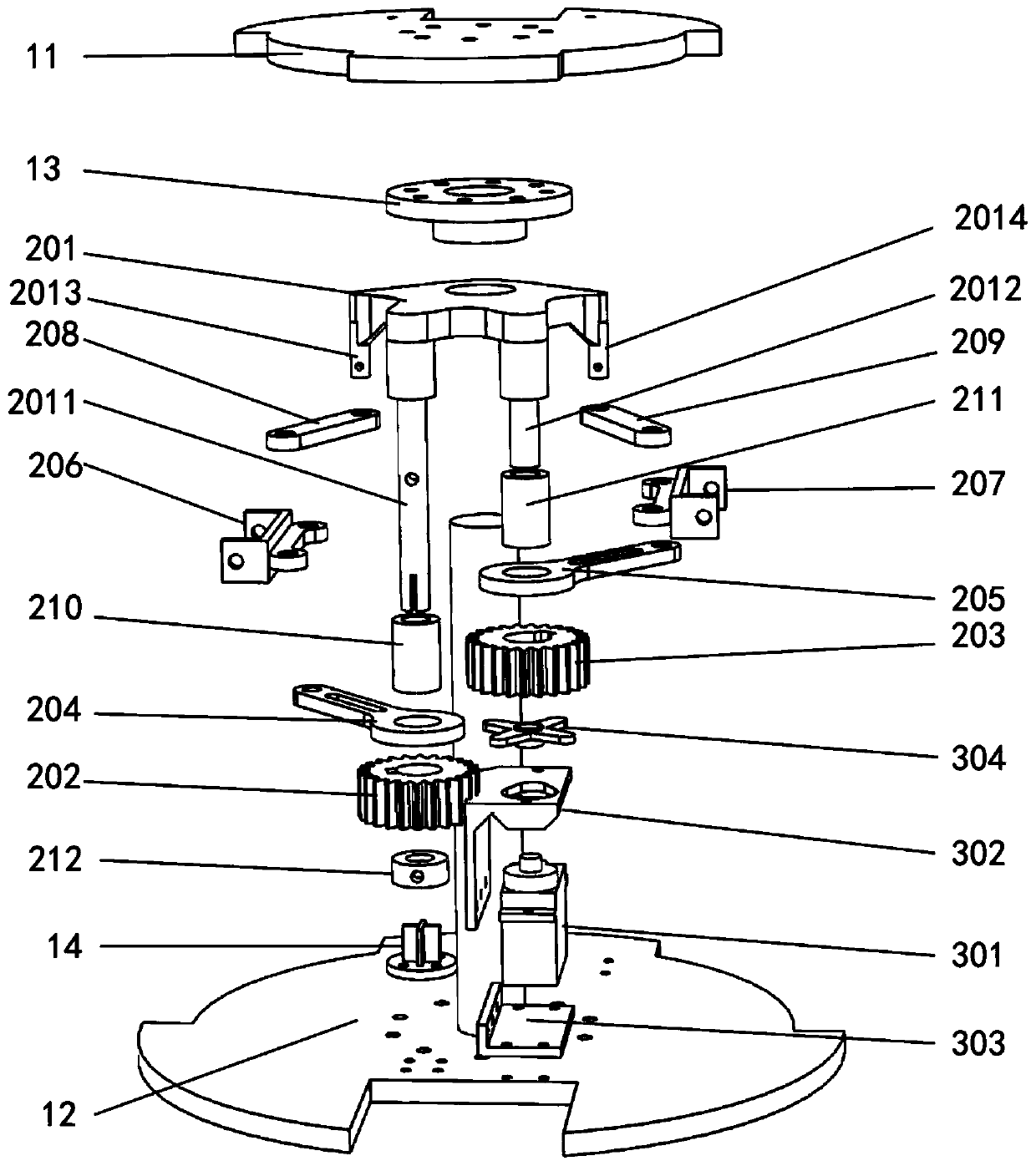
[0020] The specific embodiment of the present invention provides an underactuated hand palm that supports multiple layouts of fingers, refer to figure 1 and figure 2 , figure 2 yes figure 1 The structural schematic diagram of the remaining part of the palm structure after removing the three finger structures, the palm of the under-actuated hand includes the palm frame 1 and the transmission assembly 2 installed on the palm frame 1, the drive assembly 3, the first movable finger 4, the second Two movable fingers 5 and fixed fingers 6; the palm frame 1 plays the skeleton supporting role of the whole palm structure. The transmission assembly 2 includes a transmission frame 201 , a first four-bar linkage transmission mechanism, a second four-bar linkage transmission mechanism, a first gear 202 , and a second gear 203 . The first movable finge...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More