

Robot grabbing method based on camera communication connection and system thereof
A communication connection and robot technology, which is applied in the field of robots, can solve problems such as difficult to accurately identify the shapes of different workpieces, and achieve the effect of improving grasping efficiency, ensuring precision, and realizing transfer
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] In order to make the purpose, technical solutions and beneficial effects of the present invention clearer, the present invention will be further described in detail below in conjunction with the examples and accompanying drawings, but the embodiments of the present invention are not limited thereto.
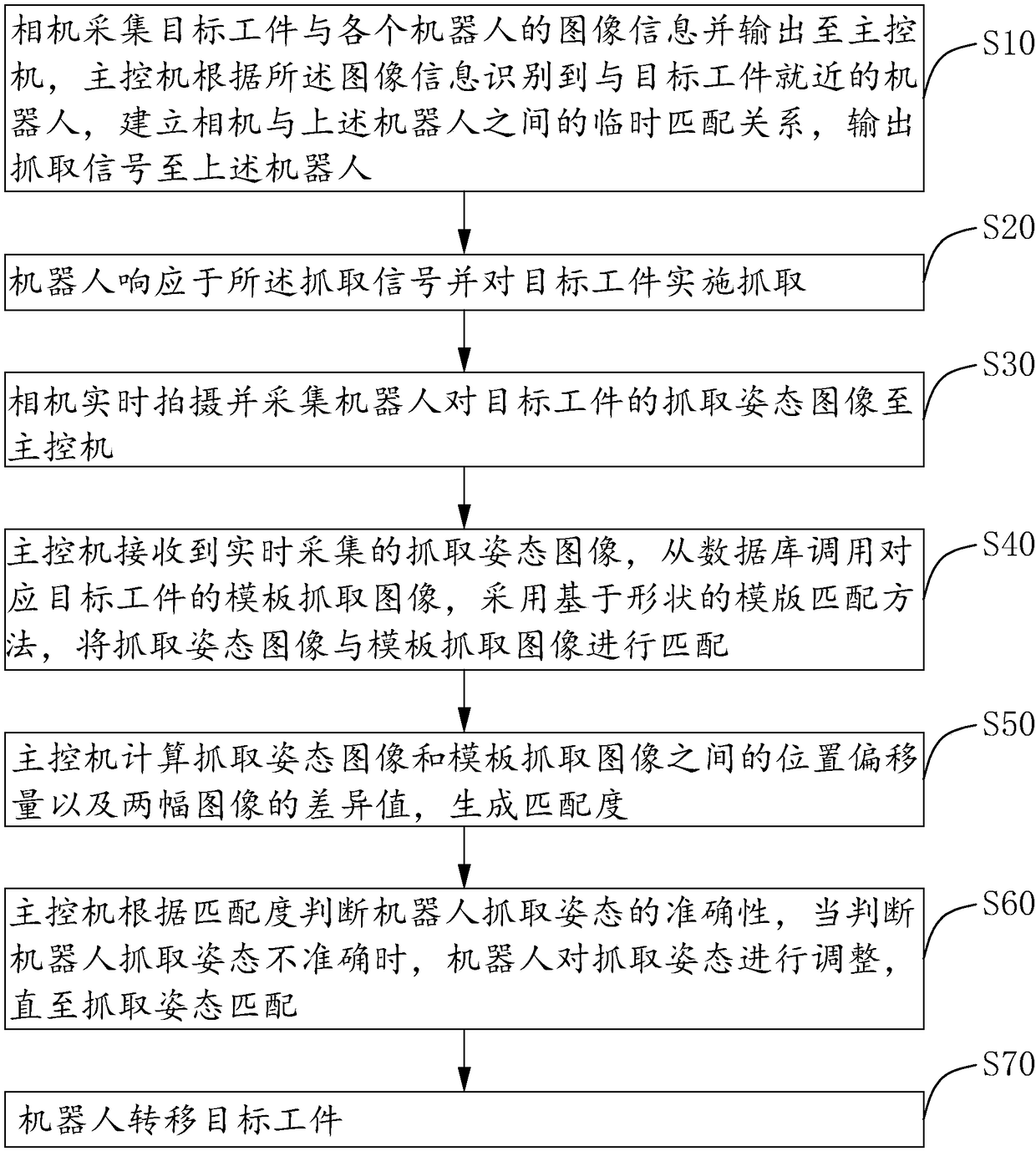
[0052] Such as figure 1 As shown, a robot grabbing method and system based on camera communication connection, including the following steps:
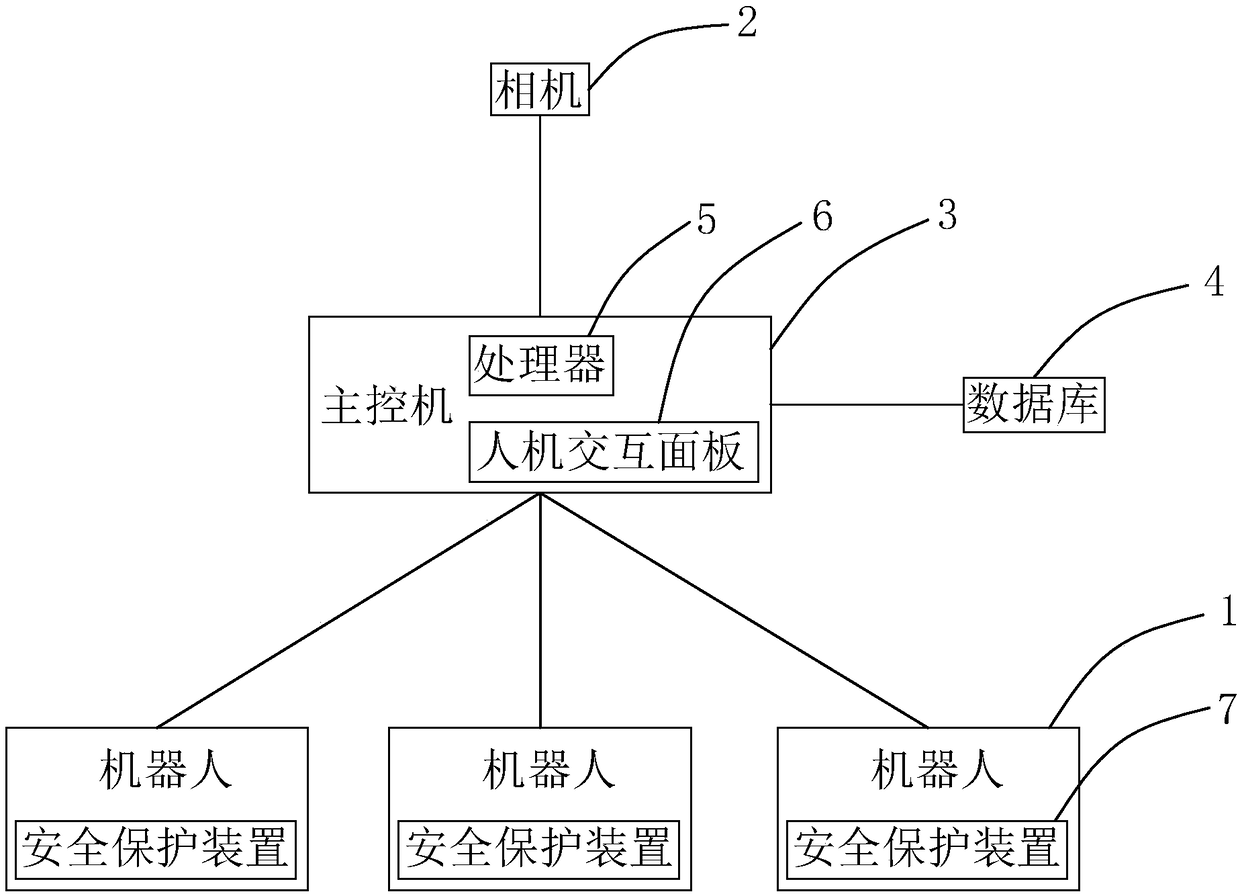
[0053] Step 1 (S10), the camera 2 collects the image information of the target workpiece and each robot 1 and outputs it to the main control computer 3, and the main control computer 3 recognizes the robot 1 that is close to the target workpiece according to the image information, and establishes the relationship between the camera 2 and the above-mentioned robot 1 Temporary matching relationship among them, and output the grasping signal to the above-mentioned robot 1. After the main control machine 3 receives the grasping instruct...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More