

Laser radar rotation control method for target detection
A laser radar and target detection technology, applied in the direction of radio wave measurement systems, instruments, etc., can solve the problems of not considering the operating speed of the carrier platform, reducing the effective detection distance of the system, and the effect of the effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The present invention will be further described below in conjunction with the accompanying drawings and specific preferred embodiments, but the protection scope of the present invention is not limited thereby.
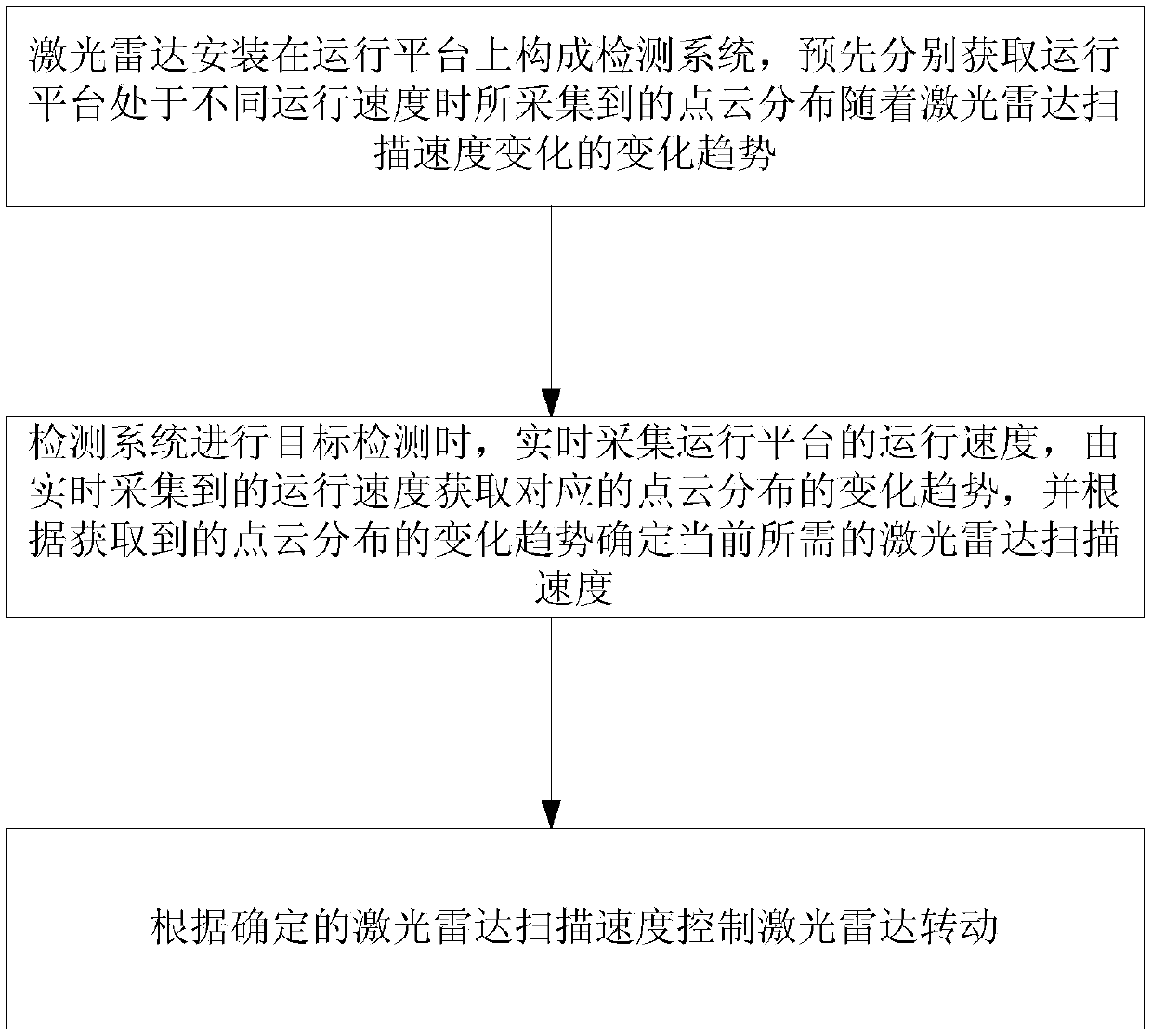
[0061] Such as figure 1 As shown, the laser radar rotation control method used for target detection in this embodiment, the steps include:
[0062] S1. Install the lidar on the operating platform to form a detection system, and obtain the point cloud distribution collected when the operating platform is at different operating speeds according to the installation location information of the lidar and the location information of the detection target in advance. The changing trend of the speed change;
[0063] S2. When the detection system performs target detection, the running speed of the operating platform is collected in real time, and the corresponding change trend of the point cloud distribution is obtained from the real-time collected running speed, and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More