

Wearable forearm active rehabilitation training exoskeleton device with myoelectric sensing
A rehabilitation training and exoskeleton technology, which is applied in the field of robotics, can solve the problems of large size, cumbersomeness, and user-friendliness of the rehabilitation training robot, and achieves the effect of compact and beautiful appearance of the equipment and reduced weight of the equipment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The technical solutions in the embodiments of the present invention will be described clearly and in detail below with reference to the drawings in the embodiments of the present invention. The described embodiments are only some of the embodiments of the invention.
[0025] The technical scheme that the present invention solves the problems of the technologies described above is:
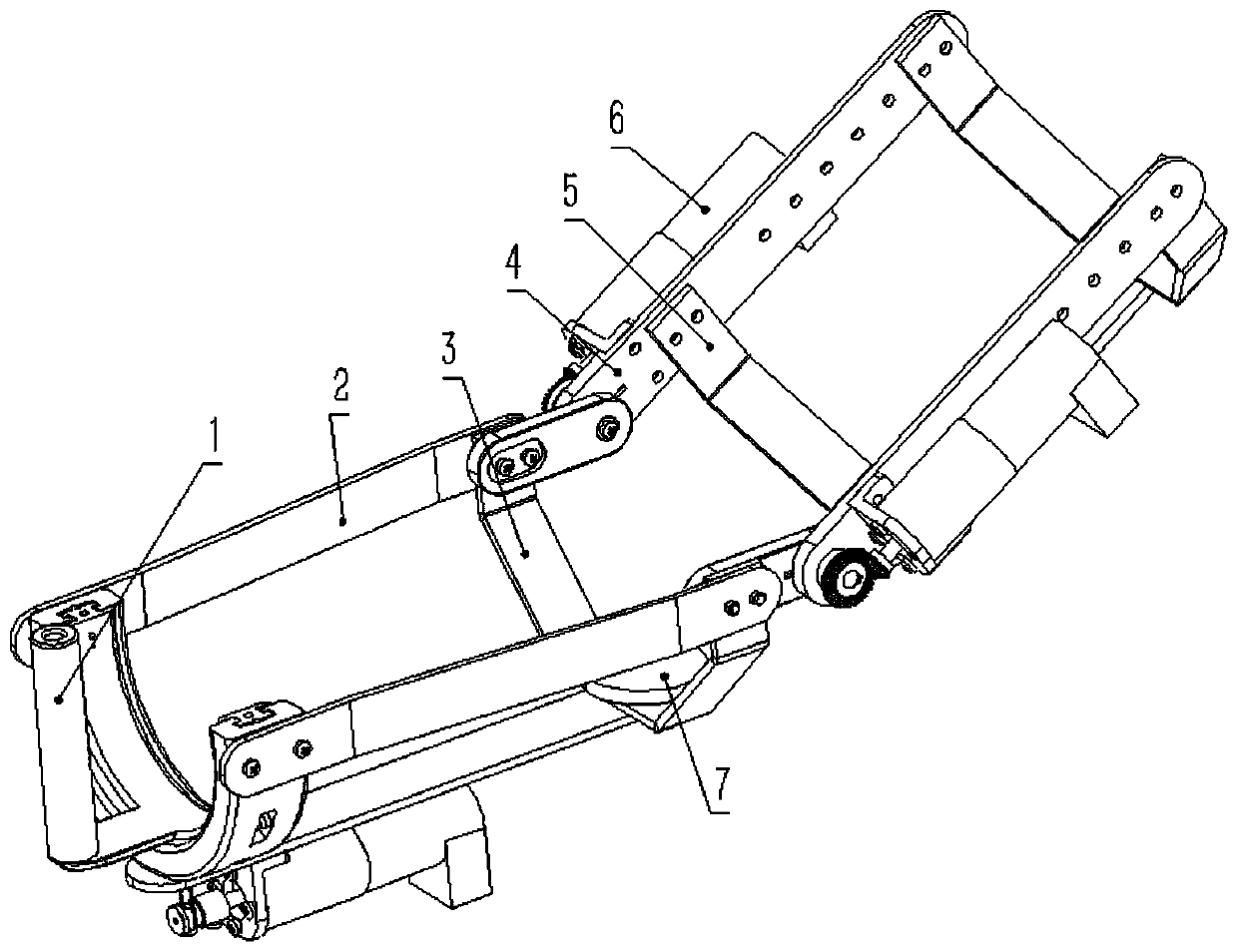
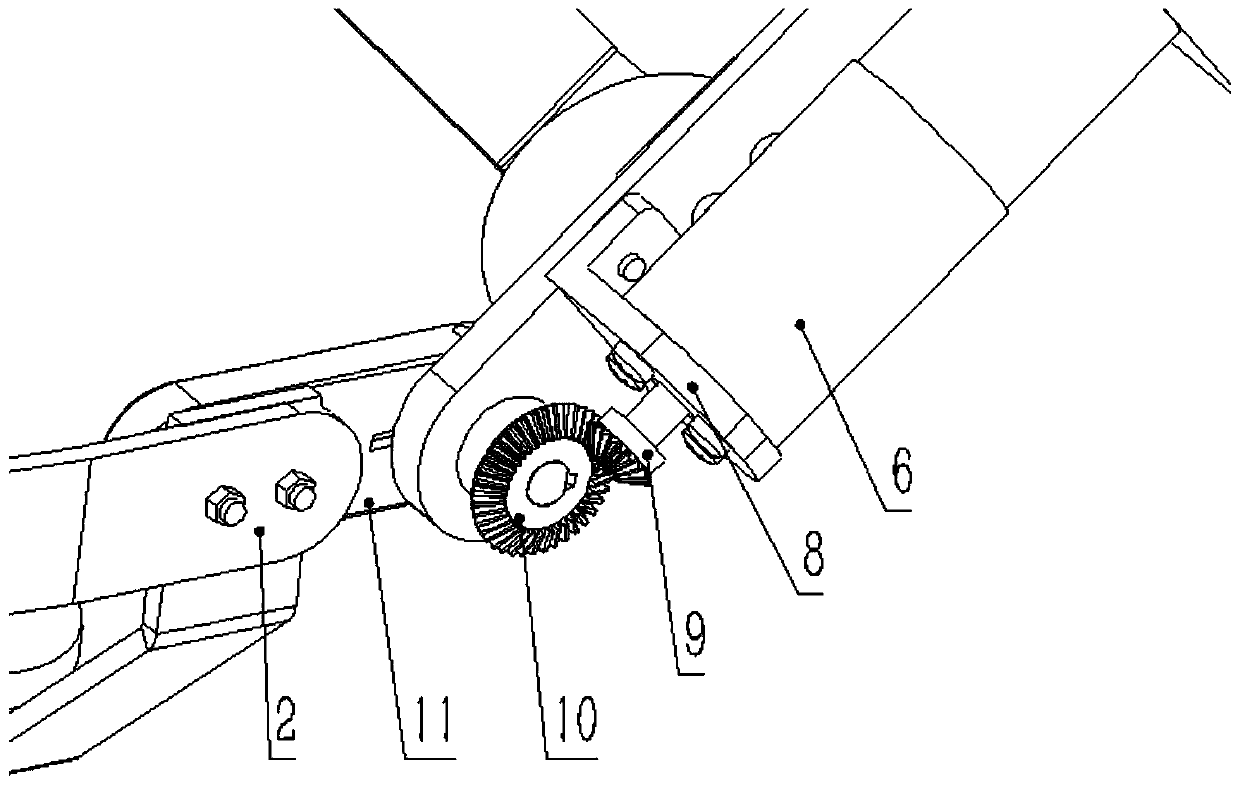
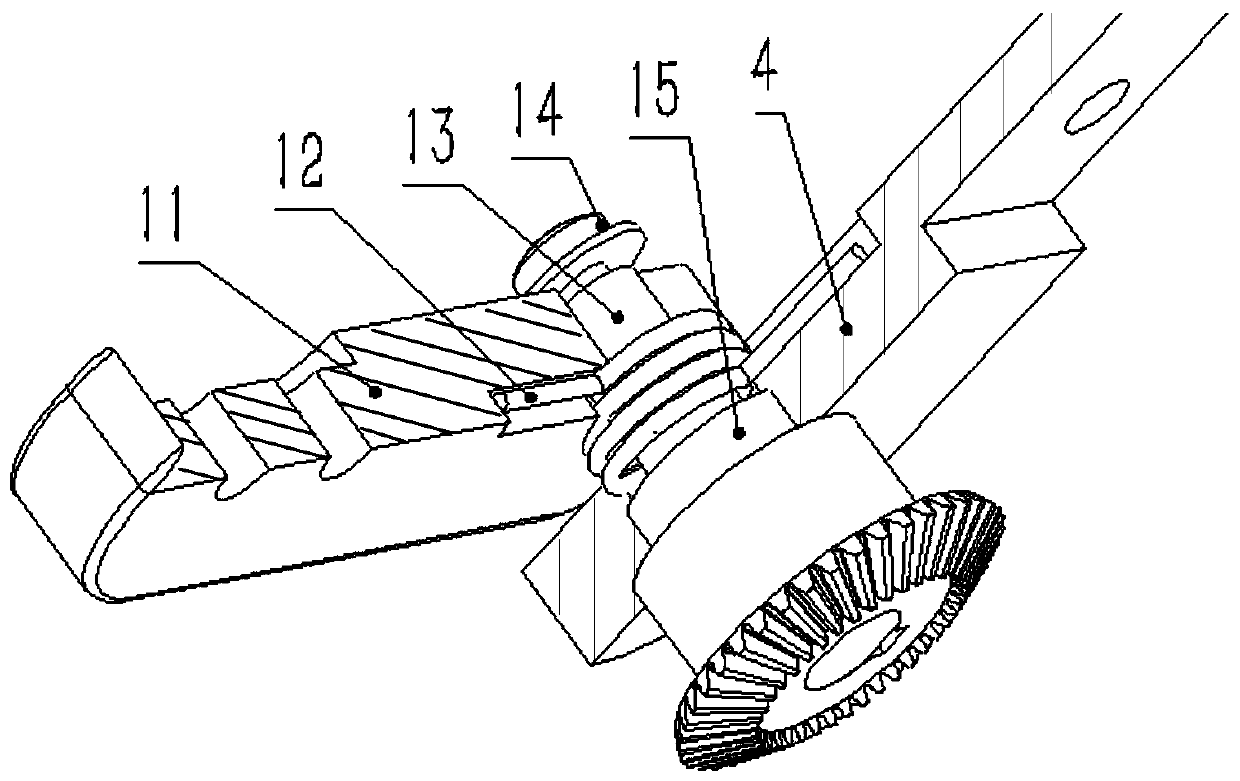
[0026] figure 1 It is the main structure diagram of the wearable forearm active rehabilitation training exoskeleton device according to the preferred embodiment of the present invention. In order to clearly show the relative positional relationship of each component inside the device, the schematic diagram of the elbow flexion and extension mechanism of the device is shown in figure 2 shown. image 3 It is the internal structure diagram of the elbow flexion and extension axis. Figure 4 Schematic diagram of the forearm rotation mechanism. Figure 5 It is the internal structure diagram ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More