

Clamping device for industrial robot
A technology of industrial robots and driving devices, which is applied in the direction of chucks, manipulators, manufacturing tools, etc., and can solve the problems of items that cannot be clamped with different specifications, and are prone to loosening and slipping.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention.
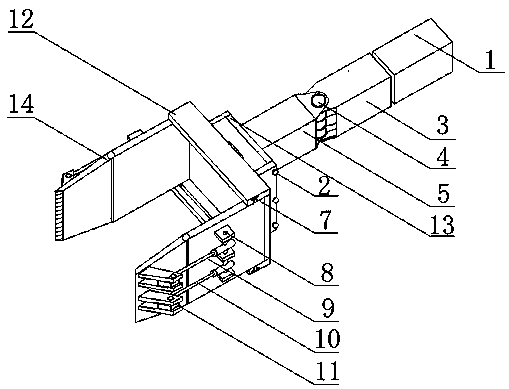
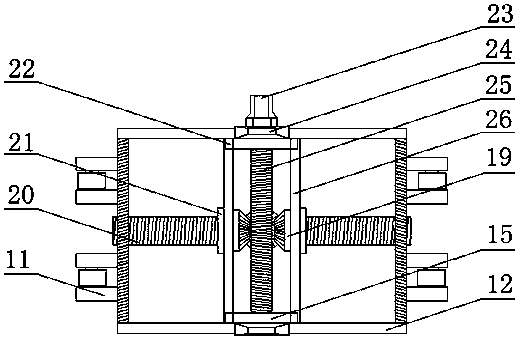
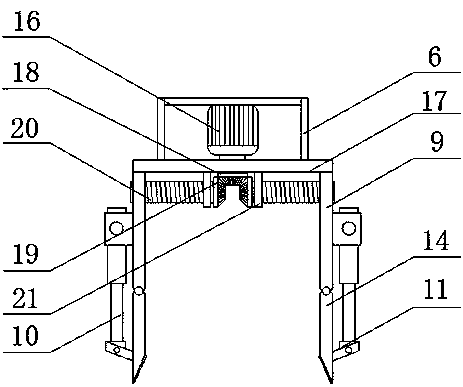
[0018] refer to Figure 1-4 , a gripping device for an industrial robot, comprising a rear arm 1, one end of the rear arm 1 is rotatably connected to a connecting arm 3, a first bolt 4 is penetrated on the side wall of one end of the connecting arm 3, and a first bolt 4 is penetrated on the first bolt 4. There is a forearm 5, a second through hole and a third through hole are arranged on one end side wall of the connecting arm 3 and the forearm 5, and the first bolt 4 passes through the second through hole and the third through hole in turn and extends to one end of the forearm 5. On the side, the end of the first bolt 4 is provided with a nut, which is locked and ea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More