

Ostrich-stimulated high-speed stability joint
A stability and joint technology, which is applied in the field of robotics and engineering bionics, can solve the problems of rigid hinged joints such as easy wear, high volatility, and over-extension, and achieve the effects of enhancing stability, reducing pressure, and preventing over-extension
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
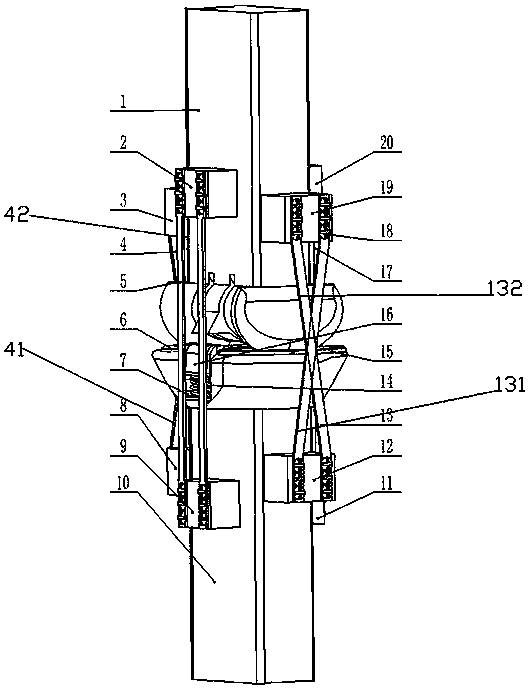
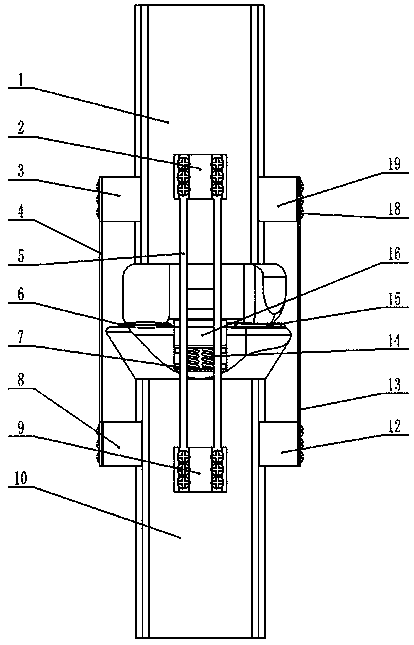
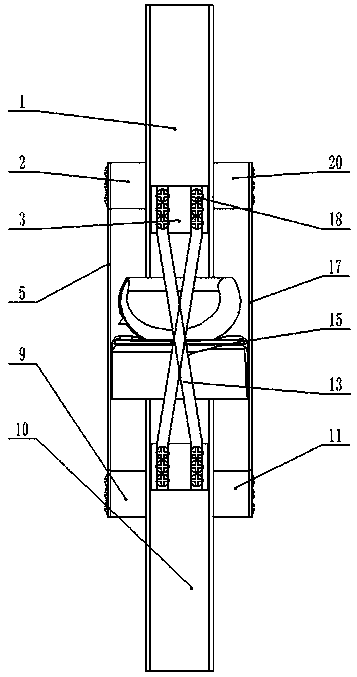
[0029] see Figure 1 to Figure 7 As shown, the far end of the joint and the body of the present invention is the outer side, and the near end is the inner side; a high-speed stability joint imitating an ostrich is composed of a first rigid rod 1, a boss 2 at the upper end of the rear side, and a boss 3 at the upper end of the outer side. , lateral cross flexible element 4, lateral cross lateral flexible element 41, lateral cross medial flexible element 42, rear parallel flexible element 5, lateral inter-joint buffer pad 6, hexagon socket screw 7, lateral lower end boss 8, rear lower end convex Platform 9, second rigid bar 10, front lower end boss 11, inner lower end boss 12, inner cross flexible element 13, inner cross outer flexible element 131, inner cross inner flexible element 132, double spring buffer seat 14, inner Inter-joint buffer pad 15, buffer slider 16, front side parallel flexible element 17, pan head screw 18, inner upper end boss 19 and front upper end boss 20; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More