

Active double-mode rope-driven five-finger dexterous manipulator
A rope-driven, dual-mode technology, applied in the field of robotics, can solve the problems of increasing practical applications of bionic robotic hands, high manufacturing costs, and high production costs, and achieve the effects of fast grasping objects, lightening weight, and strong gripping force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The specific embodiment of the present invention will be further described below in conjunction with accompanying drawing:
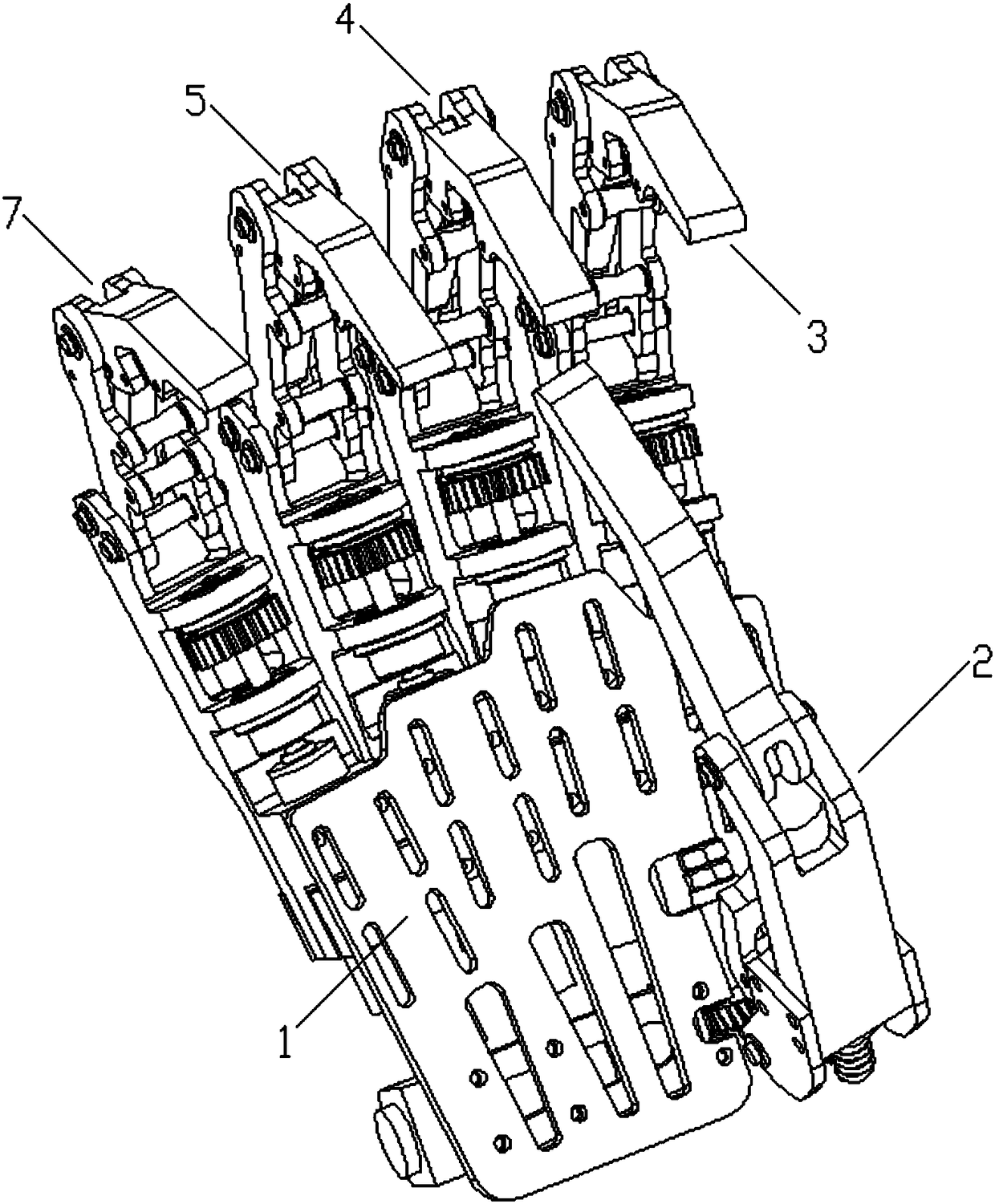
[0049] like figure 1 As shown, an active dual-mode rope-driven five-finger dexterous manipulator includes a palm assembly, and a thumb assembly 2, index finger assembly 3, middle finger assembly 4, ring finger assembly 5, and little finger assembly 6 arranged on the palm assembly.
[0050] Further, the palm assembly is a mounting plate 1, which is provided with a plurality of long holes, and the mounting plate 1 is mainly used to install the thumb assembly 2, index finger assembly 3, middle finger assembly 4, ring finger assembly 5, Little finger assembly6.
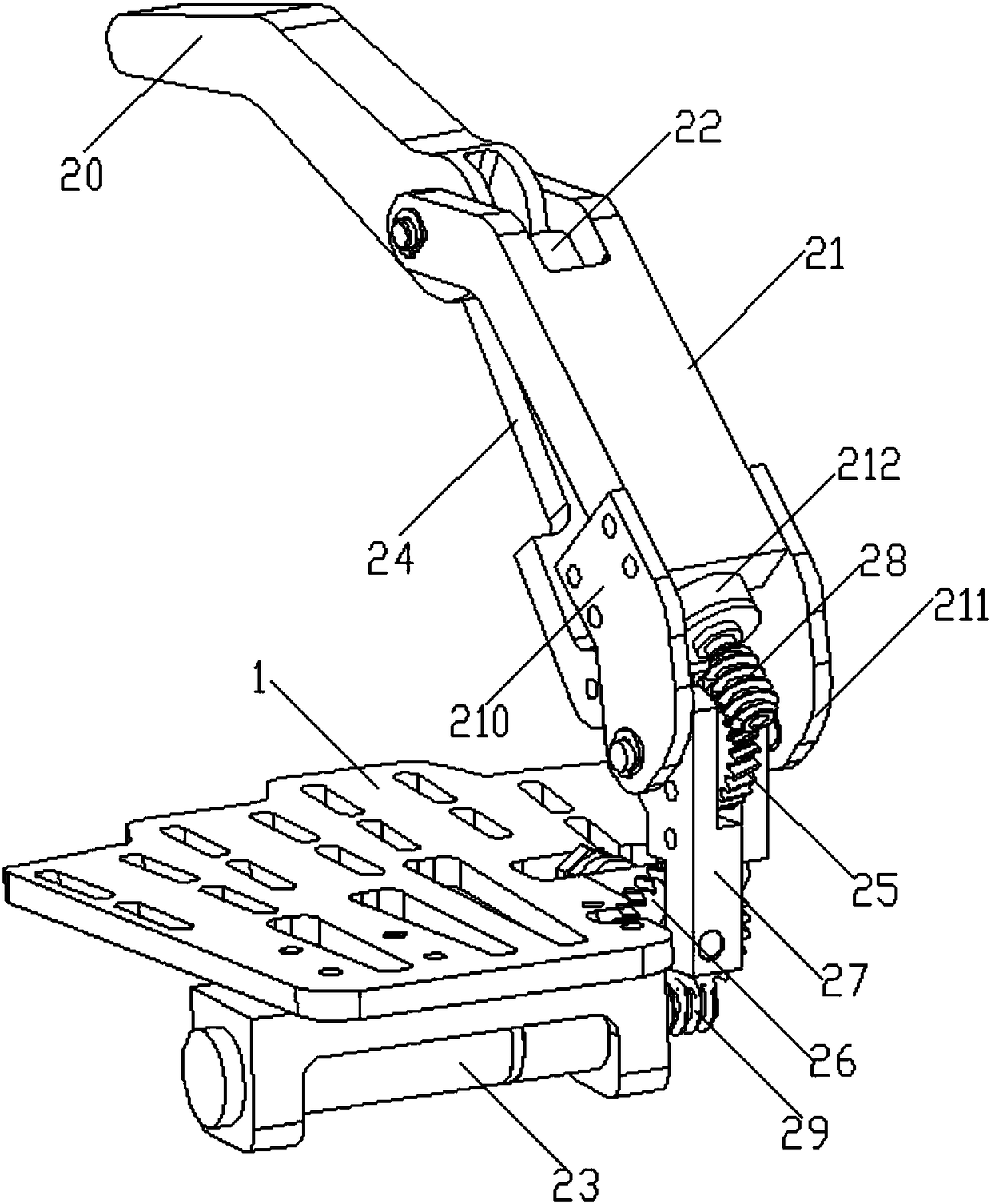
[0051] Further, such as figure 2 As shown, the thumb assembly 2 includes a first thumb joint 20, a second thumb joint 21, a thumb driving motor 22, a thumb rotating motor 23, a thumb connecting rod 24, a turbine a25, a turbine b26, and a turbine connecting rod 27. The end of the first thu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More