Sparse two-dimensional light detection and ranging based target detection and attitude estimation method
A two-dimensional laser radar and target detection technology, which is applied in the direction of measuring devices, electromagnetic wave re-radiation, radio wave measurement systems, etc., can solve the problems of high-precision three-dimensional laser radar, which is expensive and cannot be widely used, and achieves convenient implementation, Strong real-time performance and simple operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0019] The technical solutions in the embodiments of the present invention will be described more clearly and completely below in conjunction with the accompanying drawings. It should be understood, however, that the present disclosure may be embodied in various forms and should not be limited by the embodiments set forth herein; rather, these embodiments are provided for a more thorough understanding of the present disclosure and to fully convey the scope of the present disclosure to those skilled in the art.
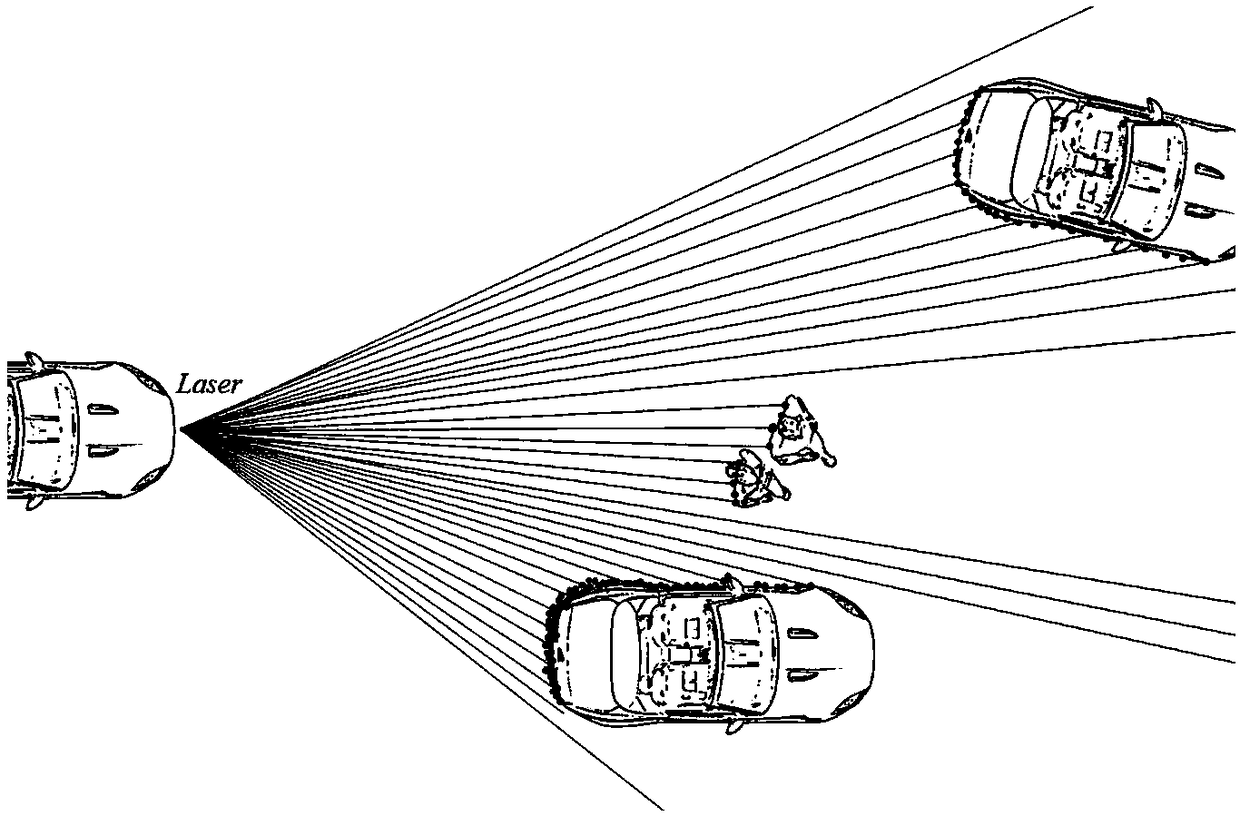
[0020] combine figure 1 , the sparse two-dimensional laser scans to the target contour and reflects to obtain the corresponding point cloud data. Therefore, in the point cloud data, most of the vehicles are in the shape of "L" (a few have "I" or "U"), while other small objects such as pedestrians are usually in irregular shapes.
[0021] combine figure 2 , this embodiment records a sparse two-dimensional lidar-based target detection and pose estimation method, incl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com