

Continuous finite time control method for teleoperation system under time-varying delay
A technology with limited time and operating system, applied in adaptive control, general control system, control/regulation system, etc., can solve the problem of non-continuous control strategy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0095] Embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings and examples. The following examples are used to illustrate the present invention, but should not be used to limit the scope of the present invention.
[0096] A continuous finite-time control method of the teleoperation system under time-varying time-delay in this embodiment includes the following steps:
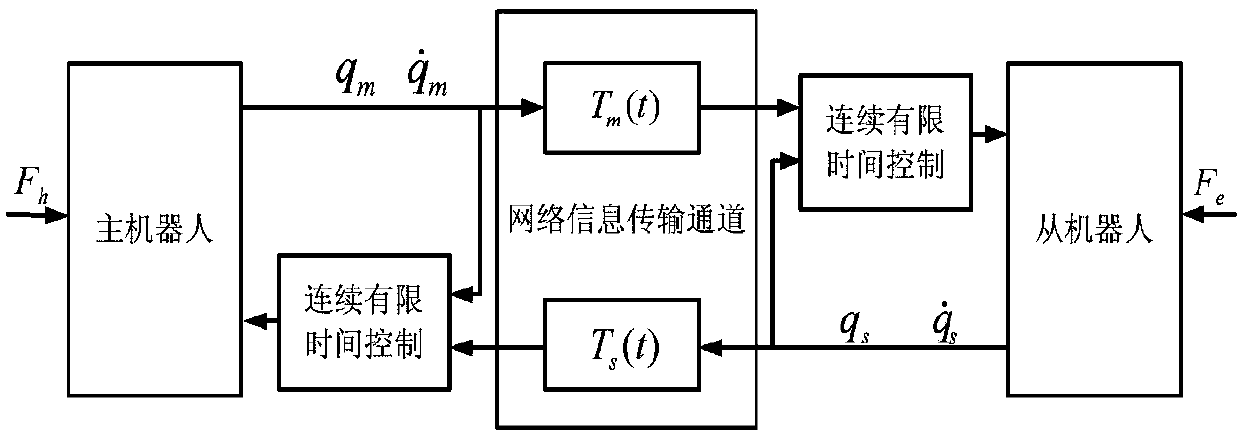
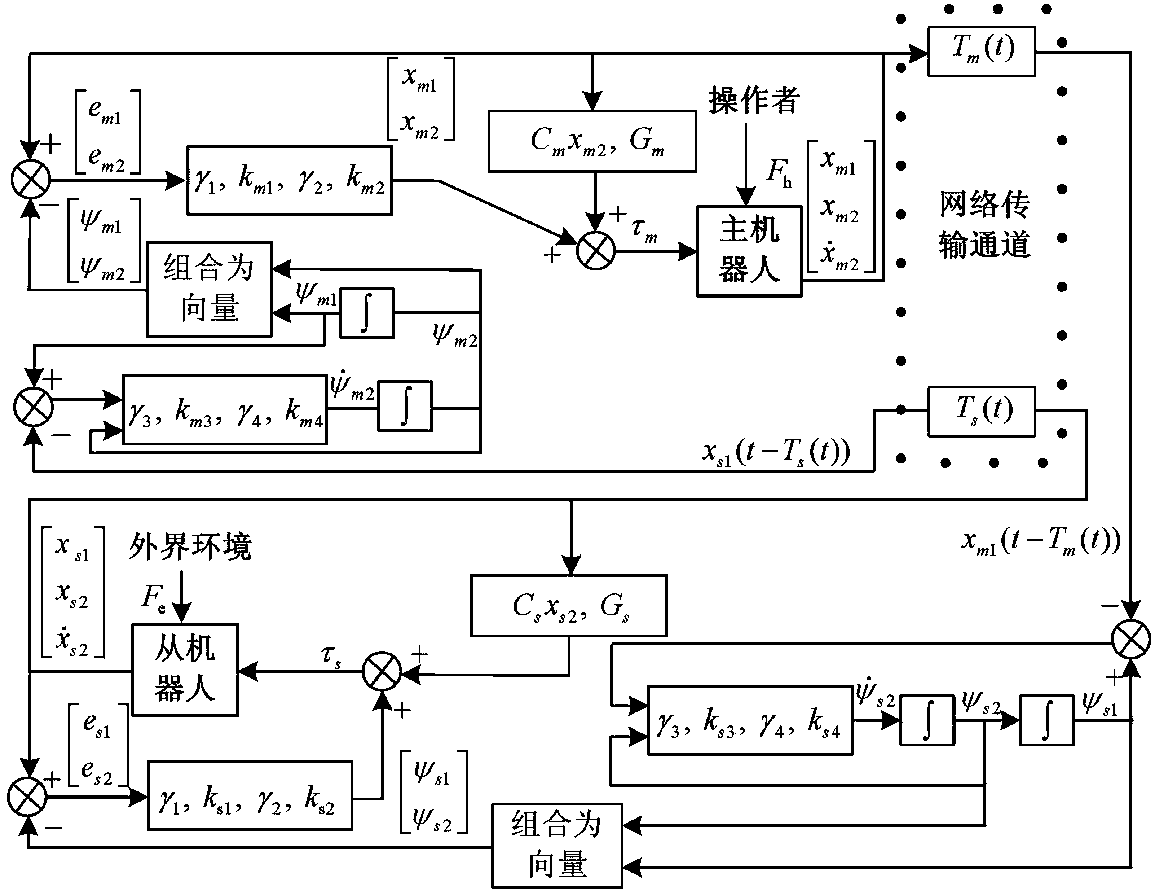
[0097] S1. Introduce a new intermediate variable to split the teleoperation system into two subsystems, define the system without time-varying delay as the first subsystem, and define the system with time-varying delay information as the second subsystem; and placing the system state of the first subsystem in the second subsystem;
[0098]Since the 1990s, with the rapid development of computer network, it has the characteristics of information exchange, equipment sharing, flexibility and high efficiency, making it gradually become the informat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More