

Finite-time neural network control method of motor-driven single-connection rod manipulator
A technology of neural network control and motor drive, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., and can solve problems such as system uncertainty, dead zone input, output limitation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0268] Example: Motor-driven single-link manipulator
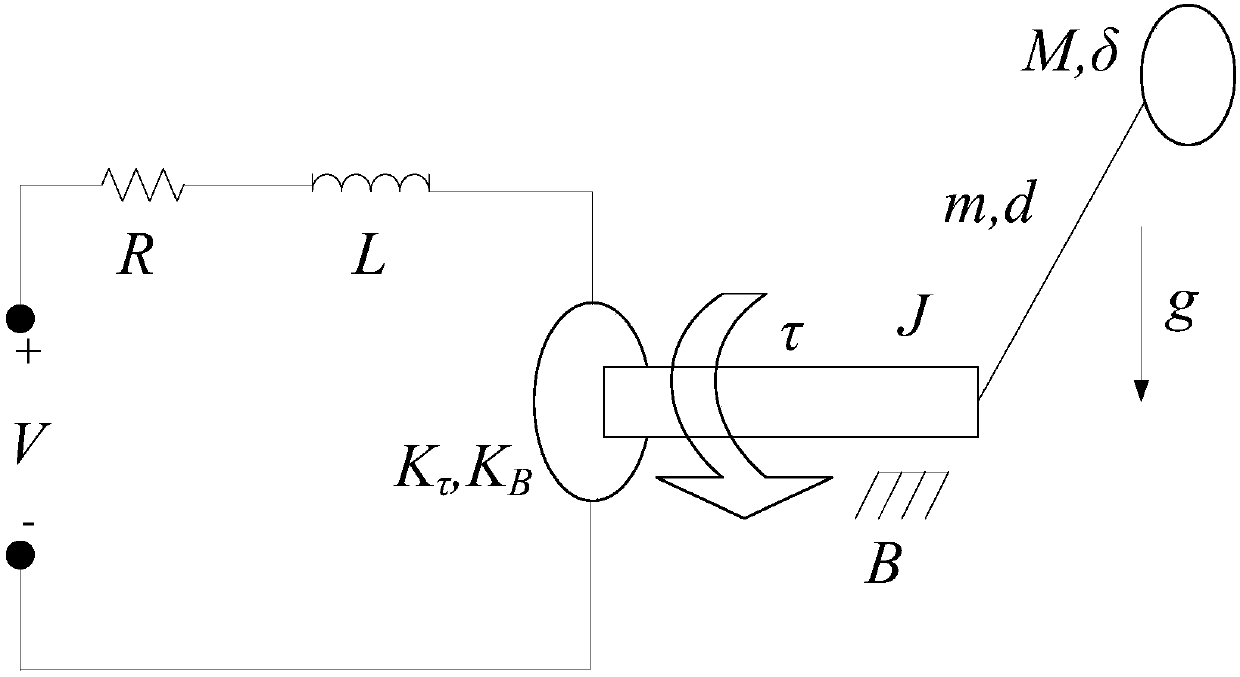
[0269] Taking the motor-driven single-link manipulator as an example to illustrate the effectiveness of the above-mentioned finite-time neural network control method in realizing the ideal trajectory tracking of the driven single-link manipulator. Such as figure 1 As shown, the system consists of a motor and a single-link manipulator. The dynamic equation of the system is as follows:
[0270]
[0271] In the formula, q, Respectively represent the angular position, angular velocity and angular acceleration, I is the motor armature current, ΔI is the current interference, L is the armature inductance, R is the armature resistance, K B is the counter electromotive force coefficient, V is the input control voltage, y is the system output, limited to the open set Ω={y:|y|c},k c is a normal constant representing the limit boundary, with The expression of is as follows:
[0272]
[0273]
[0274]
[0275] In ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More