

Mobile robot path planning method based on improved A star strategy
A mobile robot, path planning technology, applied in the direction of instruments, non-electric variable control, two-dimensional position/channel control, etc., can solve the problems of insensitive environment, trapped in obstacles, unable to meet the real-time performance of robots, etc. The effect of saving memory and computing resources, and accelerating the convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
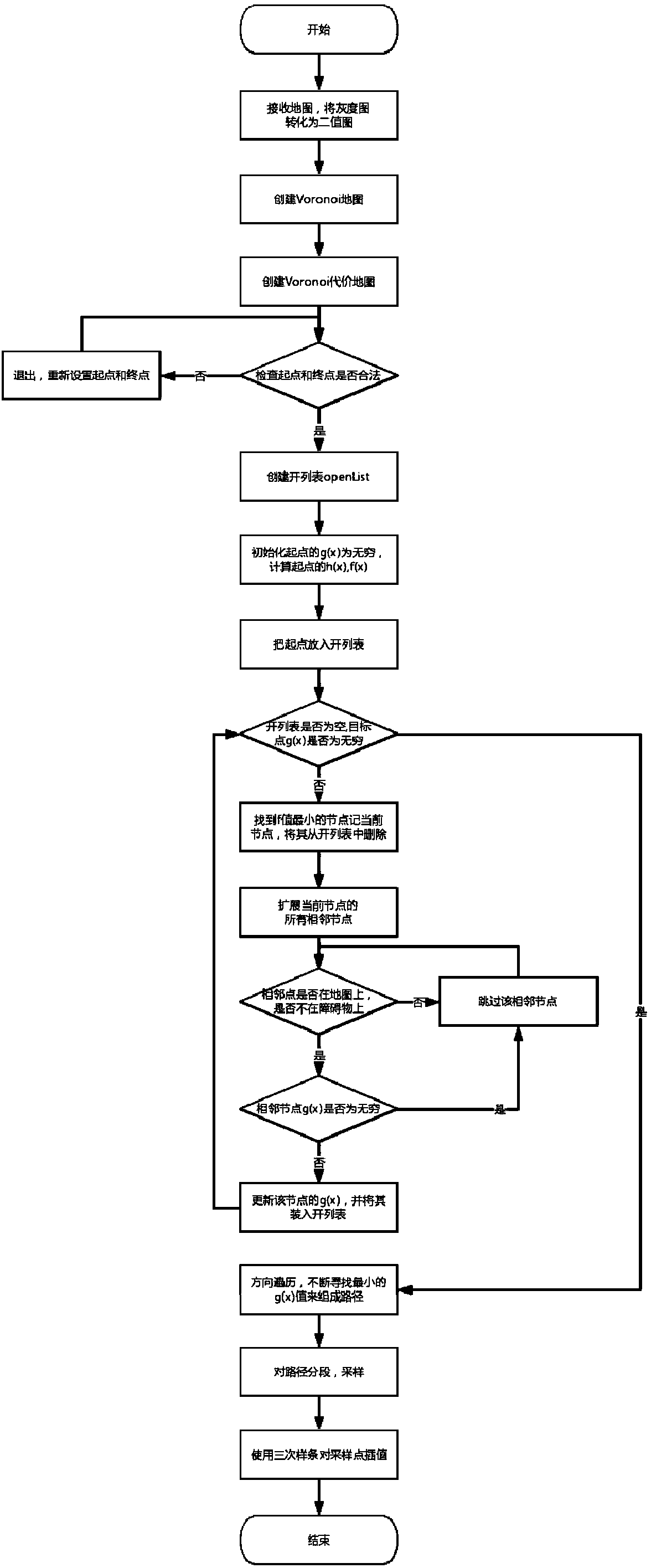
[0034] The present invention is based on the mobile robot path planning method of improving A star strategy, such as figure 1 As shown, it includes the following steps:
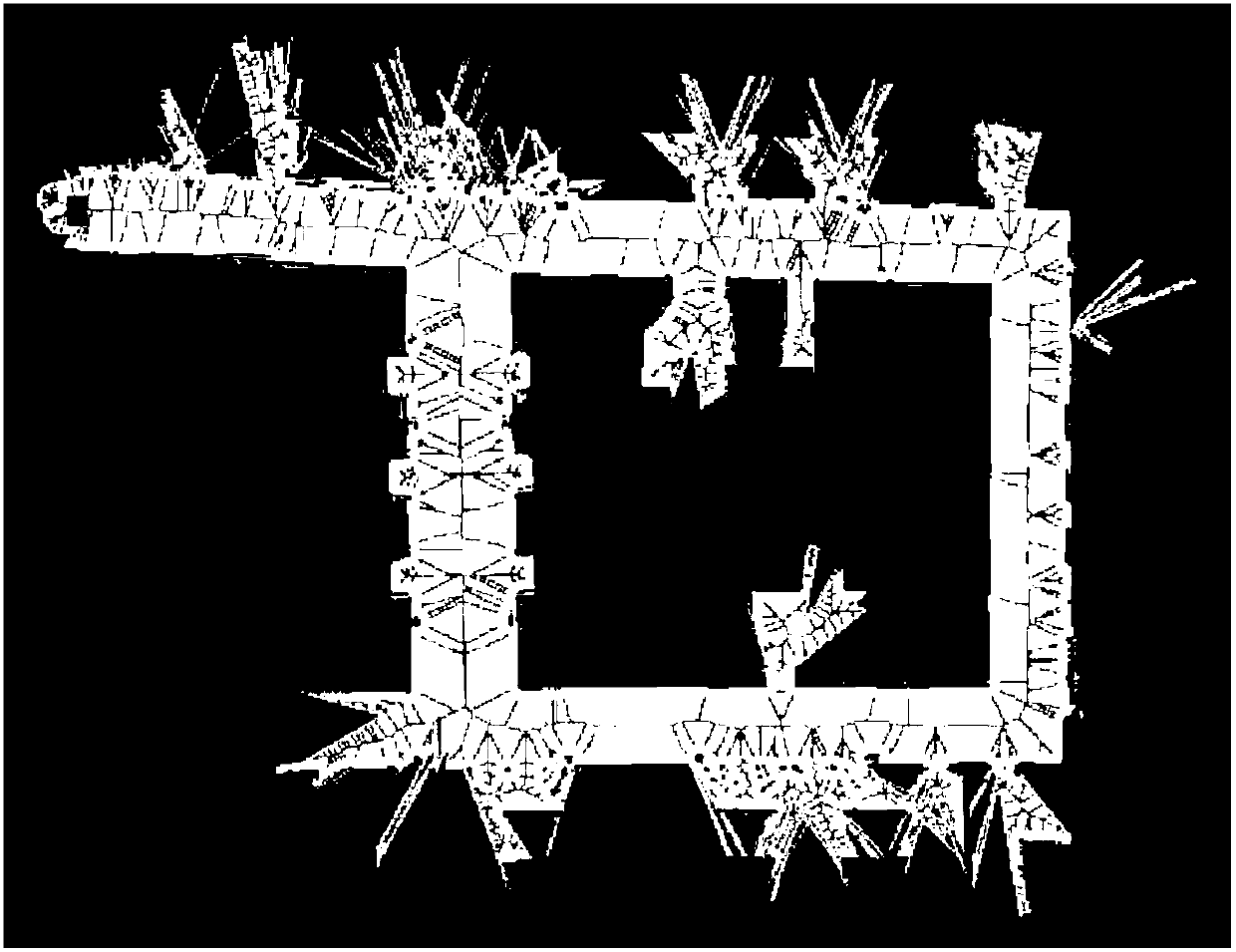
[0035] (a) Process the laser data and mileage data acquired by the mobile robot with the slam algorithm to obtain a grid map in .pgm format (each pixel is a gray value of 0-255); Figure II The value is stored in a two-dimensional array (as the input to create the Voronoi diagram, specifically, to traverse the pixels of the entire map, if value=0, then assign a value of 0, otherwise value>0 assign a value of 1); figure 2 The company's floor map obtained for the mobile robot is obtained by the slam algorithm; it generally contains two files, .pgm and .yaml; .pgm is a grayscale image containing 256 grayscale values, and .yaml is the corresponding configuration file (including image The file name, resolution and origin coordinates of the map); among them, there are three gray values in the map, the white are...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More