

Rigidity-variable soft body mechanical hand
A manipulator, stiffness technology, applied in manipulators, chucks, manufacturing tools, etc., can solve problems such as research difficulties
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0051] Below in conjunction with accompanying drawing this patent is described further.
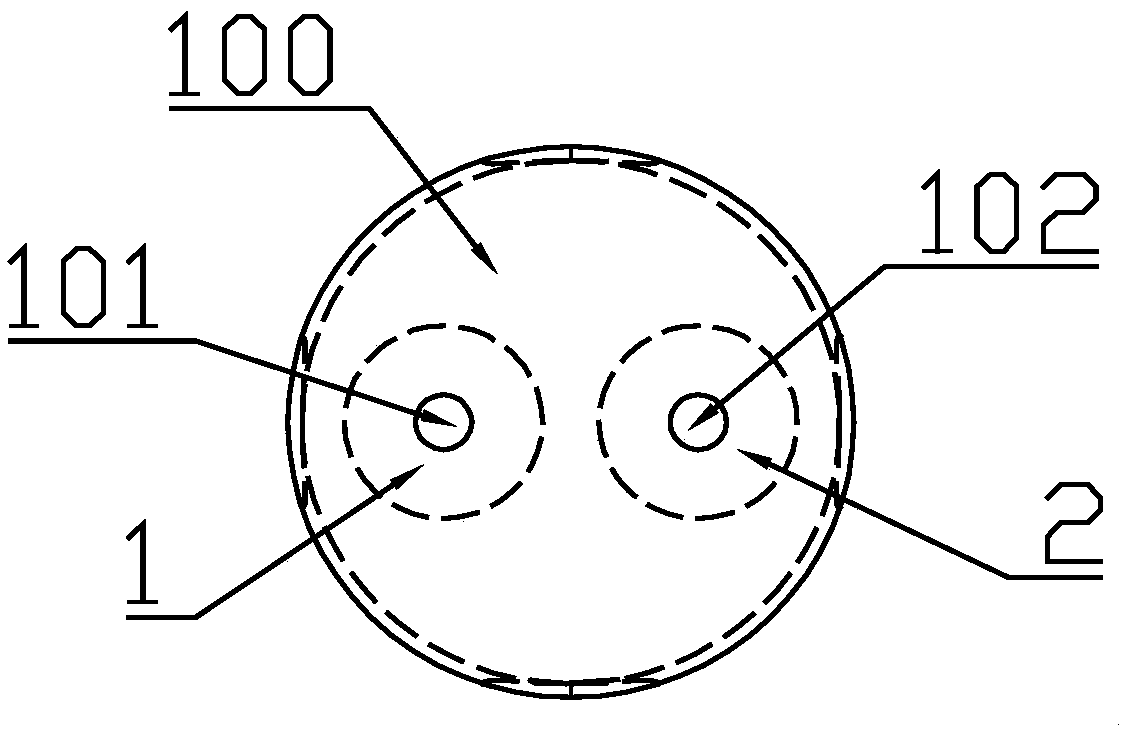
[0052] see Figure 1-2 The base 100 of the first structure is a flexible hollow tubular structure made of soft silicone or other soft materials, and the base is symmetrically distributed with two cylindrical chambers, the left chamber 1 and the right chamber 2, which are symmetrical about the axis of the base, or, see image 3 , 4 , using a relatively hard soft laminate 3 to symmetrically divide the base body into a left chamber 1 and a right chamber 2 from top to bottom. Both ends of the base body are sealed, and one end of each chamber has a base body air hole for connecting with an external drive system. The inner cavity of the base body 1 can also be symmetrically distributed with a plurality of cylindrical chambers that are symmetrical about the axis of the base body, or it can be divided into multiple chambers with a plurality of laminates, and one end of each chamber has a base ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More