

Robot bionic flexible electronic skin with controllable global rigidity
A technology of electronic skin and robot, which is applied in the direction of instruments, electrical digital data processing, data processing input/output process, etc., can solve the problem of single signal and achieve high sensing resolution, high stability, and adjustable stiffness Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with the accompanying drawings.
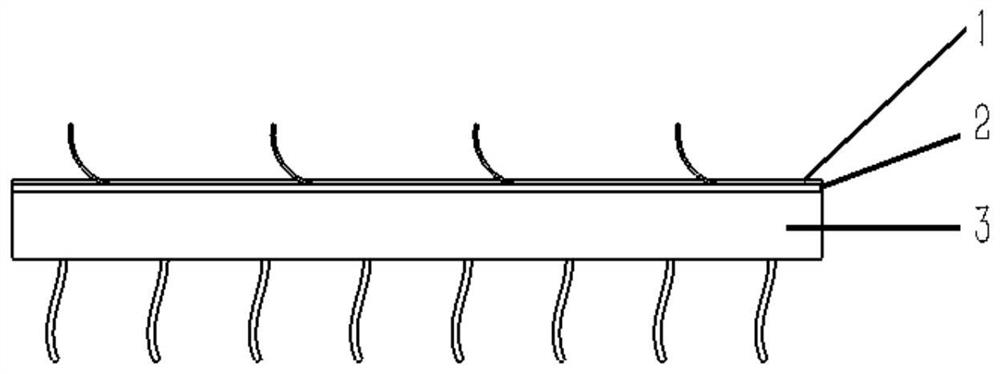
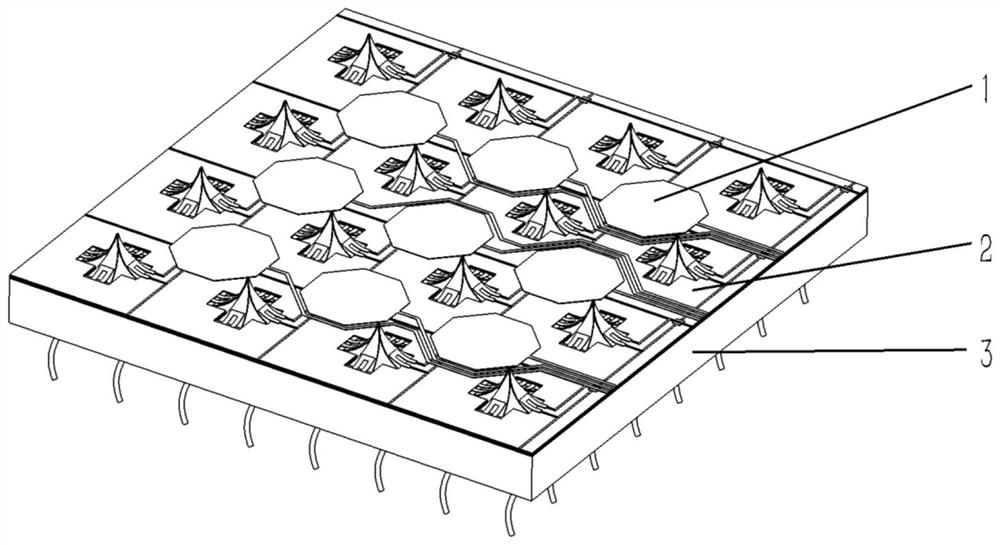
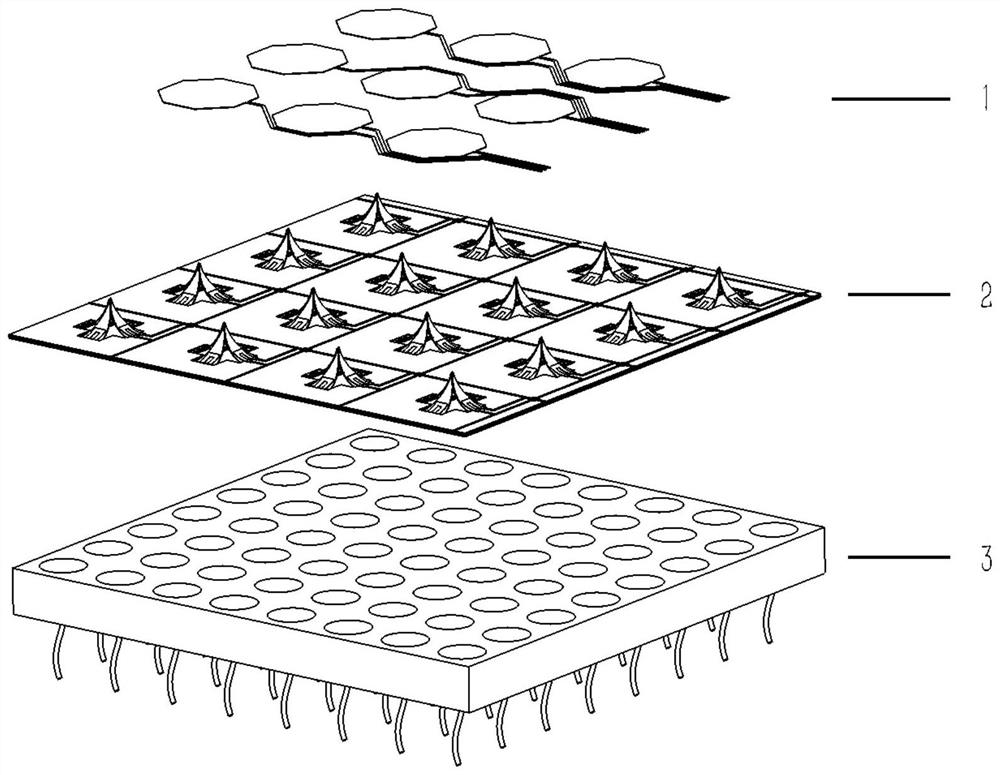
[0042] Such as figure 1 , figure 2 and image 3 As shown, the present invention includes an approach sensing layer 1, a sensitive touch sensing layer 2 and a load-sensitive tactile sensing layer 3;
[0043] The sensitive touch sensing layer 2 is stacked on the upper surface of the load sensitive tactile sensing layer 3, and the upper surface of the sensitive touch sensing layer 2 is provided with an approach sensing layer 1, and the approach sensing layer 1, the sensitive contact sensing layer 2 and the load sensitive tactile sensing layer 3 are respectively It is used to detect the approach, contact and pressure of external objects on the skin, wherein the adjustment of the load-sensitive tactile sensing layer 3 realizes the controllable global stiffness of the bionic flexible electronic skin.
[0044] Such as Figure 5 and Figure 6 As shown, the proximity sens...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More