

ROS-based catering robot and use method thereof
A technology of robots and robot bases, applied in the field of automation and electromechanical, can solve the problems of unresolved emergencies, lack of human-computer interaction service robots, etc., to improve the ability to deal with emergencies, strengthen human-computer interaction functions, and fast Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
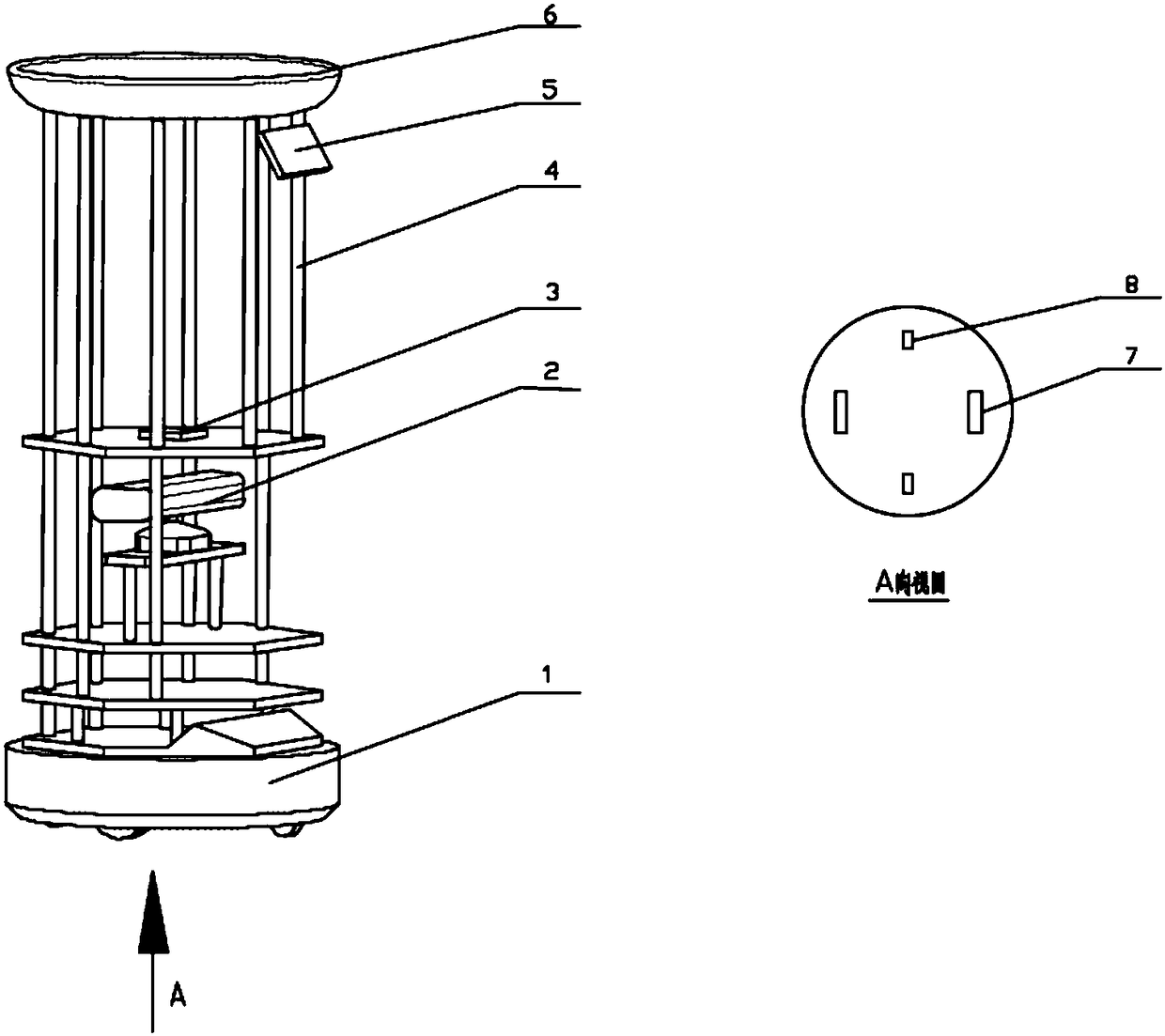
[0024] figure 1 It is a structural schematic diagram of a fully automatic shopping robot of the present invention. The present invention proposes a kind of catering robot based on ROS, comprises main control robot base 1, Kinect visual sensor 2, raspberry pie 3, support 4, LCD5, tray 6 and workstation PC 7, Kinect visual sensor 2 and raspberry pie 3 respectively Communicate with the TurtleBot2 robot platform in the main control robot base 1 through the USB serial port and be powered by the battery of the robot base 1 after voltage transformation. The HDMI interface of the TurtleBot2 robot platform in the robot base 1 and the HDMI interface of the Raspberry Pi 3 use an HDMI cable To connect, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More