

Strawberry picking robot
A technology for picking robots and strawberries, which is applied in the directions of picking machines, harvesters, agricultural machinery and implements, etc., can solve the problem of poor grasping method structure and frame structure design, and the structure of the connecting body at the connection between the grasping mechanism and the three-dimensional motion mechanism. Problems such as poor design, to achieve the effect of maintaining integrity, good integrity, and convenient adjustment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
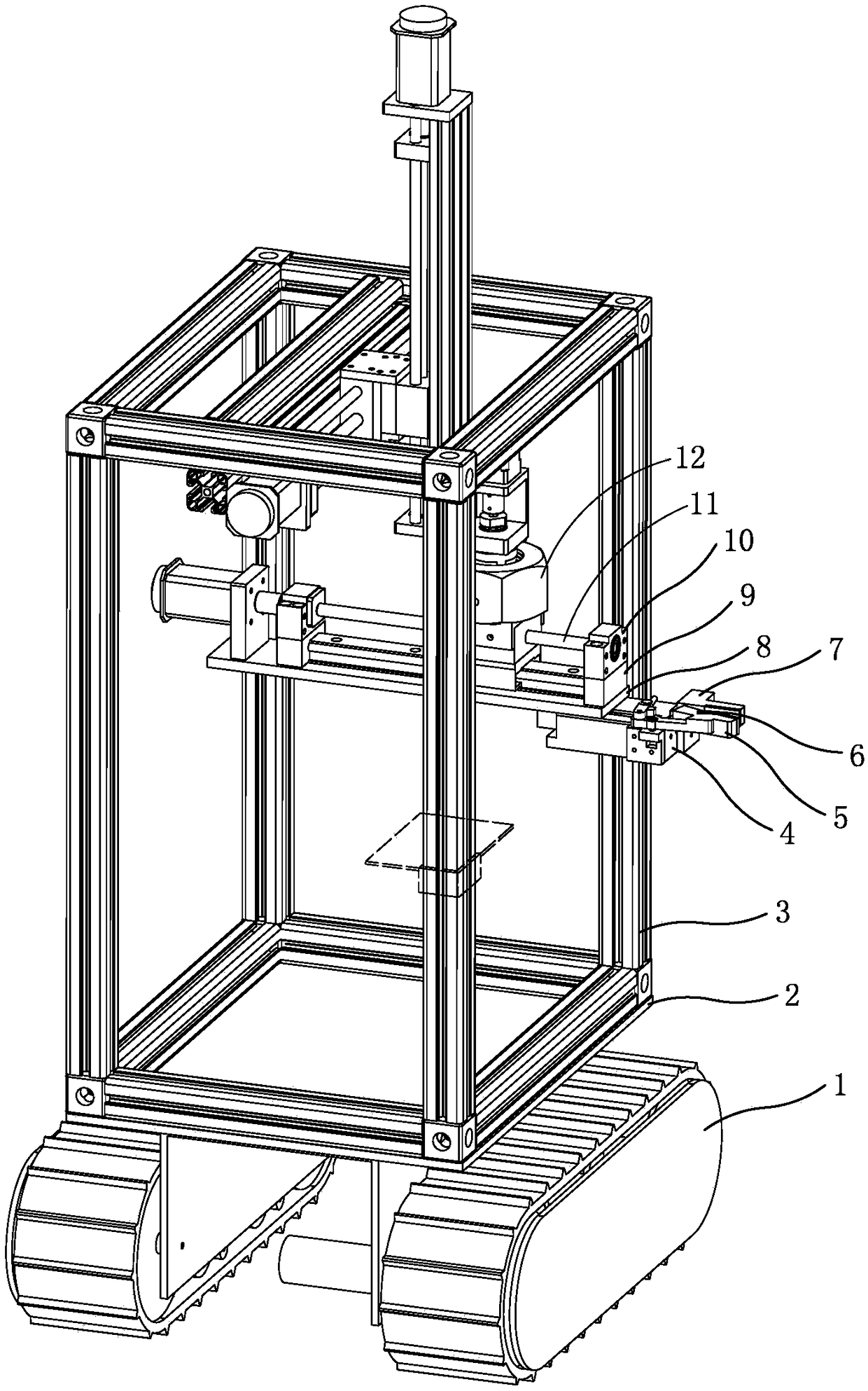
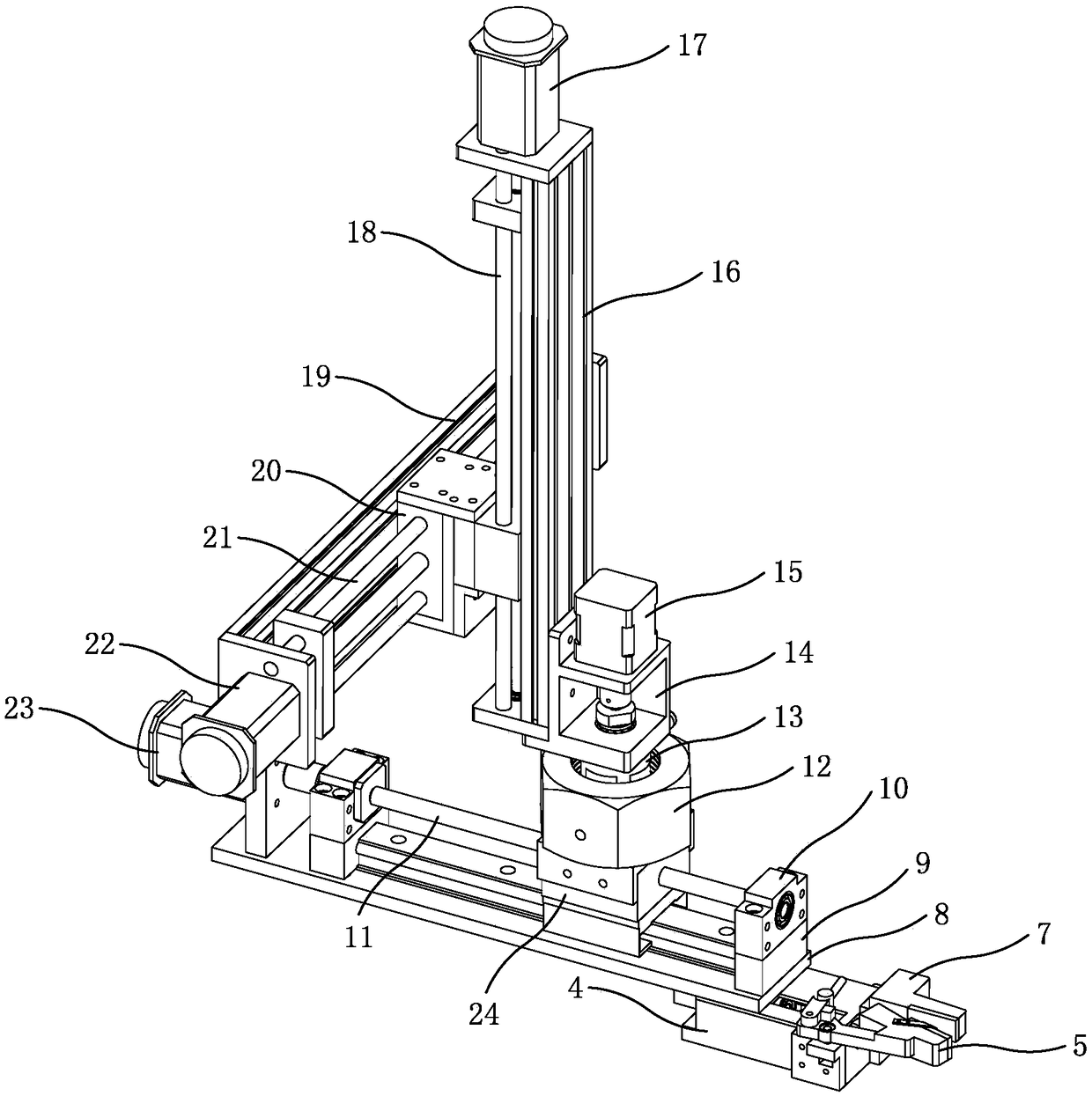
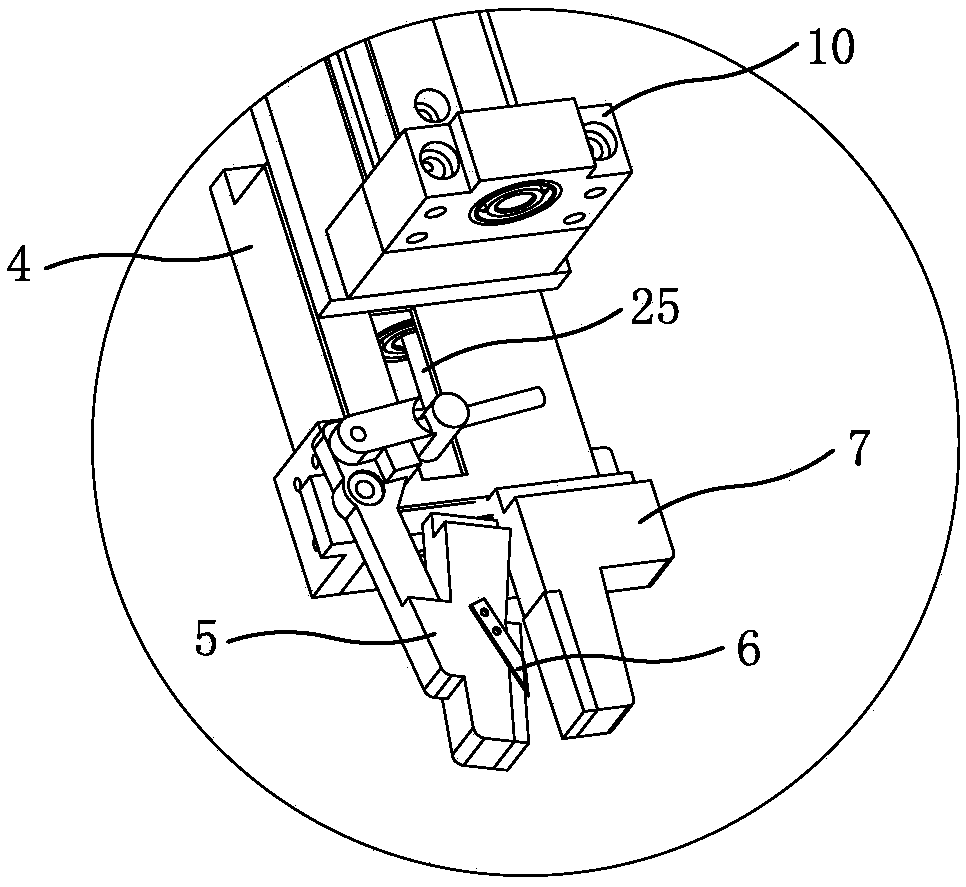
[0022] Now in conjunction with the accompanying drawings, the structure and use of the present invention will be further described. Such as Figure 1-Figure 5As shown, the frame of the strawberry picking robot is composed of aluminum profiles to form a cubic aluminum profile frame 3, the aluminum profile frame is arranged on the frame bottom plate 2, and is connected with the walking track 1 through the frame bottom plate, and the inner frame bottom plate of the walking track that is symmetrically arranged is provided with Crawler motor, the aluminum profile frame is equipped with an actuator that drives three-dimensional walking through the axial motor, and the end of the x-axis side of the actuator is equipped with a mechanical claw. The z-axis base 19 of the actuator is arranged between the inner diameters of the top of the aluminum profile frame 3 through a transverse aluminum profile, and a z-axis motor 22 is provided on one side of the z-axis base, and the z-axis motor i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More