

Automatic obstacle crossing system of crawler-type transformer substation inspection robot and automatic obstacle crossing control method
An inspection robot and robot technology, applied in non-electric variable control, control/regulation system, two-dimensional position/channel control and other directions, can solve problems such as normal operation, limited battery capacity, and immature navigation and positioning technology. , to achieve fast and efficient autonomy, realize human-computer interaction, and improve the effect of sustainable battery life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described below in conjunction with the accompanying drawings.
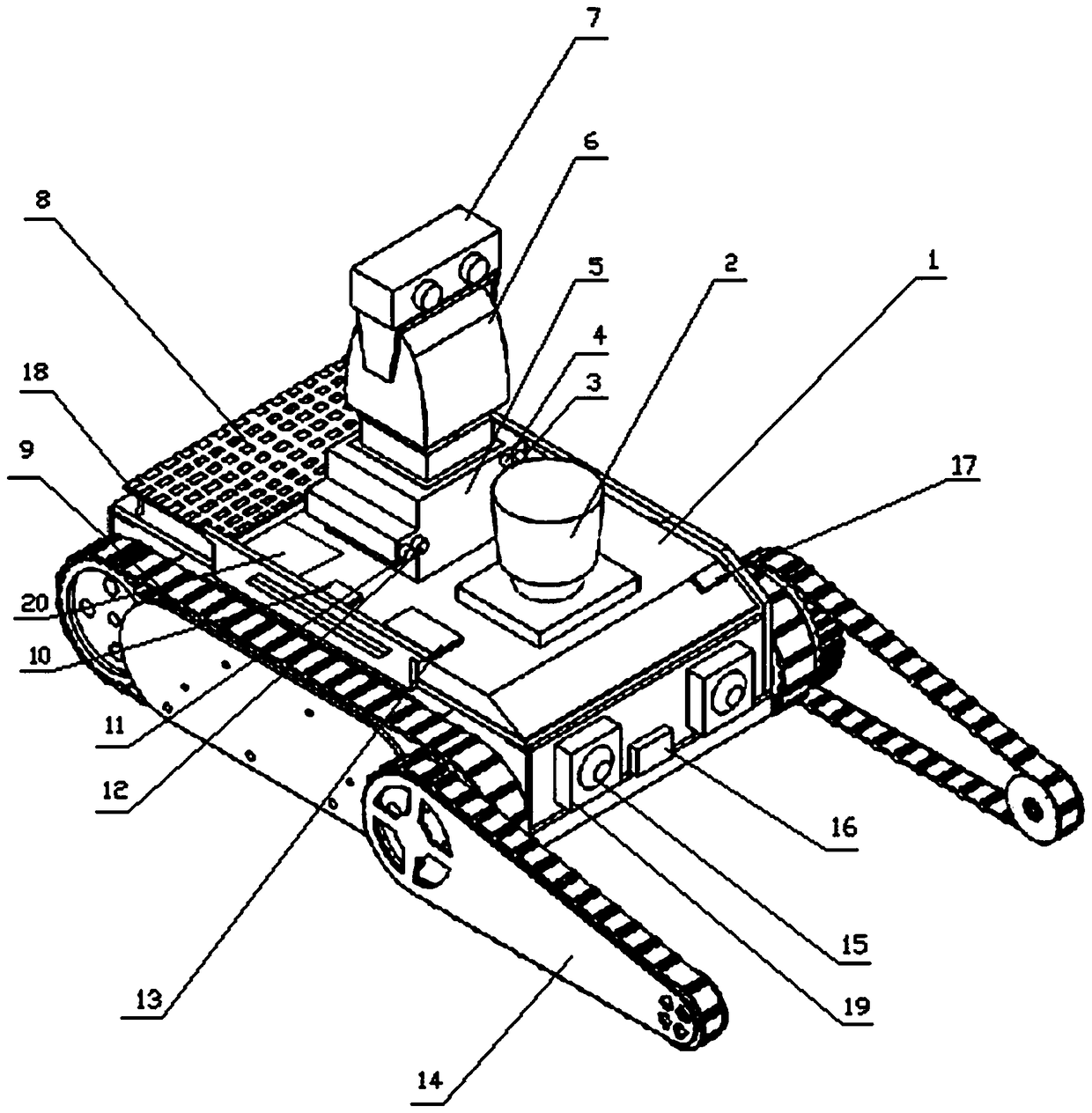
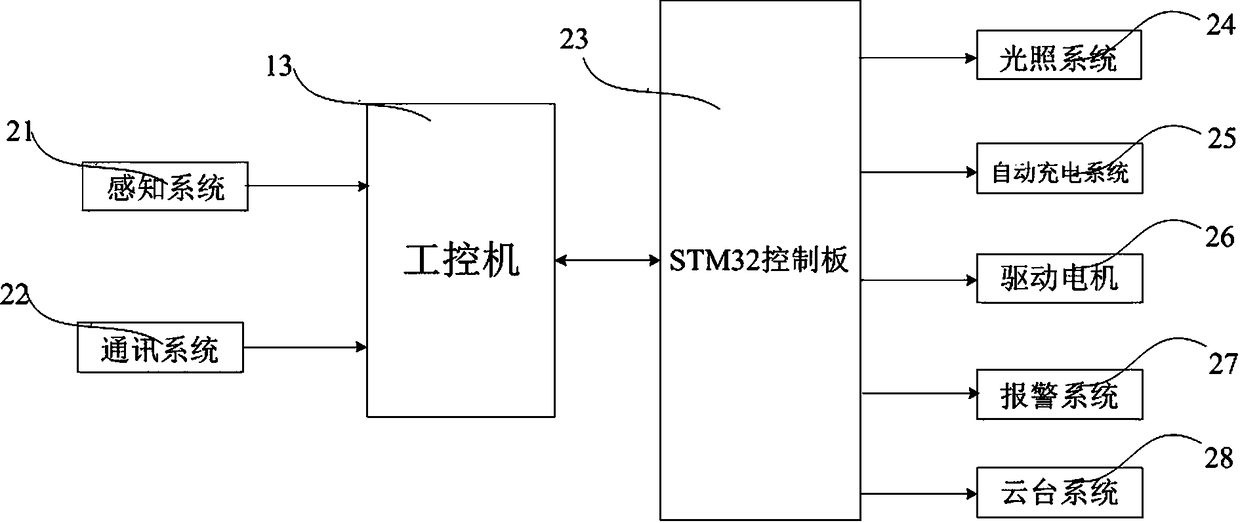
[0035] Such as figure 1 , image 3 As shown, a crawler substation inspection robot autonomous obstacle surmounting system, the system includes a mobile robot body 1, a perception system 21, a communication system 22, a control system 23, a lighting system 25, an automatic charging system 26, an alarm system 27 and a cloud Platform system 28; wherein: perception system 21, communication system 22, control system 23, lighting system 24, alarm system 27 are installed on the robot main body 1; perception system 21, motion control system 23 and communication system 22 are all connected with industrial computer 13 Information transfer.
[0036] The robot main body 1 comprises a main crawler walking unit 9 and an obstacle climbing arm unit 14; the main crawler walking unit 9 is distributed on both sides of the robot main body 1, and the walking function of the robot is real...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More